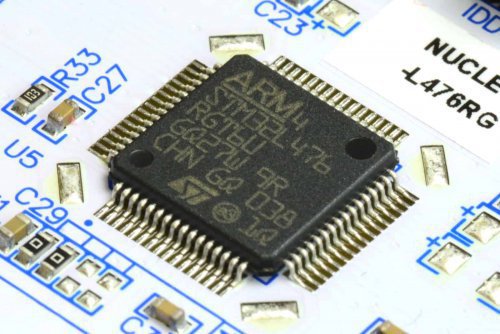
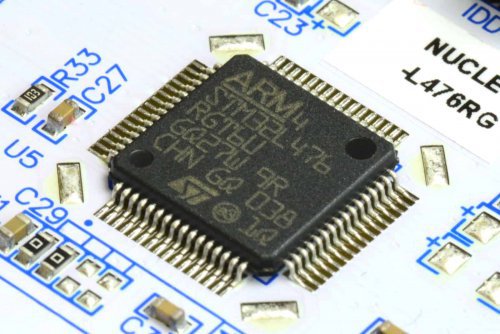
Popularny post ProeXtreme Napisano Marzec 26, 2012 Popularny post Udostępnij Napisano Marzec 26, 2012 Nadszedł czas na opis IzyboT'a - robota, którego koncept został stworzony w 2009 roku. Podstawą do zbudowania tego robota było podwozie jeżdżącego robota, zakupionego przez Zespół Szkół Mechanicznych w Opolu. Płytka PCB w całości została przeze mnie zaprojektowana i wykonana metodą termotransferu. Celem stworzenia robota był start w pierwszej edycji zawodów Follow The Line w Rybniku w 2009r. Robot świetnie się spisywał na trasie testowej. Niestety w czasie pierwszego przejazdu robot zamiast skręcić pojechał prosto. Jak się niedawno okazało, przyczyną takiego zachowania były kiepskie luty. Robot niedawno został reaktywowany, czego wynikiem był start w zawodach Robotic Tournament w Rybniku. Przez trzy lata IzyboT stał na półce i czekając na start w zawodach. Jak widać doczekał się! Zamieszczam wszystkie informacje dotyczące tego robota, aby pomóc początkującym w stworzeniu swojej pierwszej konstrukcji. Koncept: 2009 Elektronika Procesor: ATmega16 Kwarc: 16MHz Motor driver: L293D Wyświetlacz: LCD 2*16 Ilość czujników: 6 (CNY70) Zasilanie: 10 akumulatorków NiMH (na zawodach Robotic Tournament 2012 był pakiet Li-Po 800mAh) Inne:Przełącznik prędkości, wyłącznik zbędnego obciążenia, trzy LED, dwustronna PCB Mechanika Silniki: 20GA2025-08530-25 12V 230RPM Konstrukcja: Zielone plexi + metalowe dystanse + kółko od krzesła obrotowego Program Język programowania: BASCOM Poniżej znajduje się kompletny program, który sterował robotem na zawodach Robotic Tournament 2012. '------------------------------------------------------------------------------- 'Author: Piotr Śnieżek 'Nick: ProeXtreme 'E-mail: ProeXtreme@o2.pl 'Date: 23-03-2012 '------------------------------------------------------------------------------- $regfile = "m16def.dat" 'Mikrokontroler to ATmega16 $crystal = 16000000 'Kwarc 16MHz '------------------------------------------------------------------------------- 'Konfiguracja typu i pinów wyświatlacz LCD '------------------------------------------------------------------------------- Config Lcd = 16 * 2 'Wykorzystywany wyświetlacz jest organizacji 16 *2 Config Lcdpin = Pin , Db4 = Porta.3 , Db5 = Porta.2 , Db6 = Porta.1 , Db7 = Porta.0 , E = Porta.4 , Rs = Porta.5 'Konfiguracja pinów wyświetlacza '------------------------------------------------------------------------------- 'Konfiguracja PWM '------------------------------------------------------------------------------- Config Timer1 = Pwm , Pwm = 8 , Compare A Pwm = Clear Down , Compare B Pwm = Clear Down , Prescale = 8 '------------------------------------------------------------------------------- 'Konfiguracja pinów '------------------------------------------------------------------------------- Config Pina.6 = Input 'Przełącznik prędkości (1) Config Pina.7 = Input 'Przełącznik prędkości (2) Config Pinb.2 = Input 'Przełącznik prędkości (3) Config Pinb.3 = Input 'Przycisk START Config Pinb.4 = Input 'Przycisk STOP Config Portd.0 = Output 'Dioda gotowość (zielona) Config Portd.1 = Output 'Dioda ustawienia (żółta) 'Czujniki Config Pinb.1 = Input 'Czujnik 1 Config Pinb.0 = Input 'Czujnik 2 Config Pinc.7 = Input 'Czujnik 3 Config Pinc.6 = Input 'Czujnik 4 Config Pinc.1 = Input 'Czujnik 5 Config Pinc.0 = Input 'Czujnik 6 'Motor driver Config Portd.6 = Output ' 1A Config Portd.7 = Output ' 2A Config Portd.3 = Output ' 3A Config Portd.2 = Output ' 4A '------------------------------------------------------------------------------- 'Aliasy '------------------------------------------------------------------------------- Speed_button_1 Alias Pina.6 Speed_button_1_port Alias Porta.6 Speed_button_2 Alias Pina.7 Speed_button_2_port Alias Porta.7 Speed_button_3 Alias Pinb.2 Speed_button_3_port Alias Portb.2 Start_button Alias Pinb.3 'Przycisk START Start_button_port Alias Portb.3 Stop_button Alias Pinb.4 'Przycisk STOP Stop_button_port Alias Portb.4 Set Speed_button_1_port Set Speed_button_2_port Set Speed_button_3_port Led_ready Alias Portd.0 'Dioda gotowość (zielona) Led_settings Alias Portd.1 'Dioda ustawienia (żółta) Set Start_button_port Set Stop_button_port Left_motor_przod Alias Portd.6 Left_motor_tyl Alias Portd.7 Right_motor_przod Alias Portd.2 Right_motor_tyl Alias Portd.3 'Czujniki Cz1 Alias Pinb.1 'Czujnik 1 Cz2 Alias Pinb.0 'Czujnik 2 Cz3 Alias Pinc.7 'Czujnik 3 Cz4 Alias Pinc.6 'Czujnik 4 Cz5 Alias Pinc.1 'Czujnik 5 Cz6 Alias Pinc.0 'Czujnik 6 '------------------------------------------------------------------------------- 'Konfiguracja zmiennych '------------------------------------------------------------------------------- Dim Name_of_software As String * 17 'Nazwa wgranego programu Dim Version_of_software As String * 5 'Wersja wgranego programu Dim Linia As Bit Dim Tlo As Bit Dim Wcisniety As Bit Dim Puszczony As Bit Dim Max_speed As Byte 'Maksymalne wypełnienie silników PWM Dim Jedzie As Bit Dim Stoi As Bit Dim Zakret As Byte Dim Ostry_zakret As Byte Dim Przodskret As Byte Dim Licznik_czasu As Byte Dim Lewy_ostatni As Bit Dim Prawy_ostatni As Bit Dim Lewy_ostry_ostatni As Bit Dim Prawy_ostry_ostatni As Bit Dim Skret_p(6) As Byte Dim Skret_l(6) As Byte '------------------------------------------------------------------------------- 'Ustawienia wstępne '------------------------------------------------------------------------------- Name_of_software = "IzyboT 2012" Version_of_software = "v1.09" Cursor Off 'Wyłącza kursor Led_ready = 1 '0-wygaszenie diody, 1-zaświecenie diody Led_settings = 1 Linia = 1 Tlo = 0 Wcisniety = 0 Puszczony = 1 Jedzie = 1 Stoi = 0 Left_motor_przod = Stoi Left_motor_tyl = Stoi Right_motor_przod = Stoi Right_motor_tyl = Stoi Licznik_czasu = 0 '------------------------------------------------------------------------------- 'Program główny '------------------------------------------------------------------------------- Cls 'Czyści ekran Locate 1 , 3 Lcd Name_of_software Locate 2 , 7 Lcd Version_of_software Wait 1 Cls Gosub Sensors_settings Cls Do Gosub Speed_settings Do Left_motor_przod = Jedzie 'Przy rozpoczęciu jazdy robot będzie jeździł do przodu Right_motor_przod = Jedzie If Cz1 = Linia Then 'Przygotowanie do ostrego skretu w lewo Lewy_ostry_ostatni = 1 End If If Cz6 = Linia Then 'Przygotowanie do ostrego skretu w prawo Prawy_ostry_ostatni = 1 End If '............................................................................... 'Jazda na wprost '............................................................................... If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Linia And Cz4 = Linia And Cz5 = Tlo And Cz6 = Tlo Then Gosub Prosto '4,5 '............................................................................... 'Skręt w prawo '............................................................................... If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Tlo And Cz4 = Tlo And Cz5 = Linia And Cz6 = Tlo Then Gosub Lekko_w_prawo '5 If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Linia And Cz4 = Tlo And Cz5 = Linia And Cz6 = Tlo Then Gosub Lekko_w_prawo '3,5 If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Tlo And Cz4 = Linia And Cz5 = Linia And Cz6 = Tlo Then Gosub Lekko_w_prawo '4,5 If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Linia And Cz4 = Linia And Cz5 = Linia And Cz6 = Tlo Then Gosub Lekko_w_prawo '3,4,5 If Cz1 = Linia And Cz2 = Linia And Cz3 = Tlo And Cz4 = Tlo And Cz5 = Tlo And Cz6 = Tlo Then Gosub Lekko_w_prawo '1,2 If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Tlo And Cz4 = Tlo And Cz5 = Tlo And Cz6 = Linia Then Gosub Ostro_w_prawo '6 If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Tlo And Cz4 = Linia And Cz5 = Tlo And Cz6 = Linia Then Gosub Zawracanie_w_prawo '4,6 '............................................................................... 'Skręt w lewo '............................................................................... If Cz1 = Tlo And Cz2 = Linia And Cz3 = Tlo And Cz4 = Tlo And Cz5 = Tlo And Cz6 = Tlo Then Gosub Lekko_w_lewo '2 If Cz1 = Tlo And Cz2 = Linia And Cz3 = Linia And Cz4 = Tlo And Cz5 = Tlo And Cz6 = Tlo Then Gosub Lekko_w_lewo '2,3 If Cz1 = Tlo And Cz2 = Linia And Cz3 = Tlo And Cz4 = Linia And Cz5 = Tlo And Cz6 = Tlo Then Gosub Lekko_w_lewo '2,4 If Cz1 = Tlo And Cz2 = Linia And Cz3 = Linia And Cz4 = Linia And Cz5 = Tlo And Cz6 = Tlo Then Gosub Lekko_w_lewo '2,3,4 If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Tlo And Cz4 = Tlo And Cz5 = Linia And Cz6 = Linia Then Gosub Lekko_w_lewo '5,6 If Cz1 = Linia And Cz2 = Tlo And Cz3 = Tlo And Cz4 = Tlo And Cz5 = Tlo And Cz6 = Tlo Then Gosub Ostro_w_lewo '1 If Cz1 = Linia And Cz2 = Tlo And Cz3 = Tlo And Cz4 = Linia And Cz5 = Tlo And Cz6 = Tlo Then Gosub Zawracanie_w_lewo '1,4 '............................................................................... 'Skrzyżowanie '............................................................................... If Cz2 = Linia And Cz3 = Linia And Cz5 = Linia Then Gosub Prosto '2,3,5 '............................................................................... 'Kierunek jazdy nie określony '............................................................................... If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Tlo And Cz4 = Linia And Cz5 = Tlo And Cz6 = Tlo Then If Prawy_ostatni = 1 Or Prawy_ostry_ostatni = 1 Then Pwm1a = Max_speed Pwm1b = Max_speed Right_motor_przod = Stoi Waitms 15 Right_motor_tyl = Jedzie Do Loop Until Cz3 = Linia Or Cz2 = Linia Right_motor_tyl = Stoi Waitms 15 Right_motor_przod = Jedzie Prawy_ostry_ostatni = 0 Lewy_ostry_ostatni = 0 End If If Lewy_ostatni = 1 Or Lewy_ostry_ostatni = 1 Then Pwm1a = Max_speed Pwm1b = Max_speed Left_motor_przod = Stoi Waitms 15 Left_motor_tyl = Jedzie Do Loop Until Cz3 = Linia Or Cz2 = Linia Left_motor_tyl = Stoi Waitms 15 Left_motor_przod = Jedzie Prawy_ostry_ostatni = 0 Lewy_ostry_ostatni = 0 End If End If 'Powrót na linię po wyjechaniu za nią If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Tlo And Cz4 = Tlo And Cz5 = Tlo And Cz6 = Tlo Then If Prawy_ostatni = 1 Then Pwm1a = Max_speed Pwm1b = Zakret End If If Prawy_ostry_ostatni = 1 Then Pwm1a = Max_speed Pwm1b = Max_speed Right_motor_przod = Stoi Waitms 15 Right_motor_tyl = Jedzie Do Loop Until Cz3 = Linia Or Cz2 = Linia Right_motor_tyl = Stoi Waitms 15 Right_motor_przod = Jedzie Prawy_ostry_ostatni = 0 Lewy_ostry_ostatni = 0 End If If Lewy_ostatni = 1 Then Pwm1a = Zakret Pwm1b = Max_speed End If If Lewy_ostry_ostatni = 1 Then Pwm1a = Max_speed Pwm1b = Max_speed Left_motor_przod = Stoi Waitms 15 Left_motor_tyl = Jedzie Do Loop Until Cz3 = Linia Or Cz2 = Linia Left_motor_tyl = Stoi Waitms 15 Left_motor_przod = Jedzie Prawy_ostry_ostatni = 0 Lewy_ostry_ostatni = 0 End If End If '............................................................................... 'Przyciski ustawień prędkości '............................................................................... If Start_button = Wcisniety Then Cls Lcd "Zakret PWM: " Do Loop Until Start_button = Puszczony Do Locate 1 , 13 Lcd Zakret ; " " If Cz5 = Linia Then Pwm1a = Max_speed Pwm1b = Zakret End If If Cz2 = Linia Then Pwm1a = Zakret Pwm1b = Max_speed End If Licznik_czasu = 0 Led_settings = 0 While Start_button = Wcisniety Do Waitms 10 Incr Licznik_czasu If Licznik_czasu = 100 Then Led_settings = 1 Loop Until Start_button = Puszczony If Led_settings = 1 Then Exit Do If Licznik_czasu >= 3 Then Zakret = Zakret + 5 Wend Licznik_czasu = 0 Led_settings = 0 While Stop_button = Wcisniety Do Waitms 10 Incr Licznik_czasu Loop Until Stop_button = Puszczony If Licznik_czasu >= 3 Then Zakret = Zakret - 5 Wend Loop 'Until Start_button = Puszczony End If If Stop_button = Wcisniety Then Cls Lcd "OstryZ PWM: " Do Loop Until Start_button = Puszczony Do Locate 1 , 13 Lcd Ostry_zakret ; " " If Cz5 = Linia Then Pwm1a = Max_speed Pwm1b = Ostry_zakret End If If Cz2 = Linia Then Pwm1a = Ostry_zakret Pwm1b = Max_speed End If Licznik_czasu = 0 Led_settings = 0 While Start_button = Wcisniety Do Waitms 10 Incr Licznik_czasu Loop Until Start_button = Puszczony If Licznik_czasu >= 3 Then Ostry_zakret = Ostry_zakret + 5 Wend Licznik_czasu = 0 Led_settings = 0 While Stop_button = Wcisniety Do Waitms 10 Incr Licznik_czasu If Licznik_czasu = 100 Then Led_settings = 1 Loop Until Stop_button = Puszczony If Led_settings = 1 Then Exit Do If Licznik_czasu >= 3 Then Ostry_zakret = Ostry_zakret - 5 Wend Loop 'Until Stop_button = Puszczony End If '............................................................................... 'Wyświetlanie wartości PWM '............................................................................... Home Lcd "PWM1a: " ; Pwm1a ; " " Lowerline Lcd "PWM1b: " ; Pwm1b ; " " Loop 'Until Stop_button = Wcisniety Pwm1a = 0 Pwm1b = 0 Left_motor_przod = Stoi Right_motor_przod = Stoi Do If Start_button = Wcisniety Then Waitms 25 If Start_button = Wcisniety Then Exit Do End If Loop Loop End 'End program Sensors_settings: 'Ustawienia czujników Cls Do If Cz1 = Tlo And Cz2 = Tlo And Cz3 = Linia And Cz4 = Linia And Cz5 = Tlo And Cz6 = Tlo Then Home If Linia = 1 Then Lcd "Linia biala " Else Lcd "Linia czarna " End If Lowerline If Tlo = 1 Then Lcd "Tlo biale " Else Lcd "Tlo czarne " End If Waitms 500 Exit Do Else Toggle Linia Toggle Tlo Gosub Ustaw_robota_na_linii End If Loop Home 'Kursor na pozycji 1, 1 Lcd " C2: C3: C5: " Lowerline Lcd " C1: C4: C6: " Do If Cz2 = Linia Then Locate 1 , 5 Lcd "1" Else Locate 1 , 5 Lcd "0" End If If Cz3 = Linia Then Locate 1 , 10 Lcd "1" Else Locate 1 , 10 Lcd "0" End If If Cz5 = Linia Then Locate 1 , 15 Lcd "1" Else Locate 1 , 15 Lcd "0" End If If Cz1 = Linia Then Locate 2 , 5 Lcd "1" Else Locate 2 , 5 Lcd "0" End If If Cz4 = Linia Then Locate 2 , 10 Lcd "1" Else Locate 2 , 10 Lcd "0" End If If Cz6 = Linia Then Locate 2 , 15 Lcd "1" Else Locate 2 , 15 Lcd "0" End If If Start_button = Wcisniety Then Waitms 25 If Start_button = Wcisniety Then Exit Do End If Loop Do Loop Until Start_button = Puszczony Return Ustaw_robota_na_linii: Lcd " Ustaw robota " Lowerline Lcd " na linii " Return Speed_settings: Cls Lcd "Maks. predkosc: " Do 'Wszystkie ON If Speed_button_1 = Wcisniety And Speed_button_2 = Wcisniety And Speed_button_3 = Wcisniety Then Max_speed = 255 'Dwa ON If Speed_button_1 = Wcisniety And Speed_button_2 = Wcisniety And Speed_button_3 = Puszczony Then Max_speed = 200 If Speed_button_1 = Wcisniety And Speed_button_2 = Puszczony And Speed_button_3 = Wcisniety Then Max_speed = 200 If Speed_button_1 = Puszczony And Speed_button_2 = Wcisniety And Speed_button_3 = Wcisniety Then Max_speed = 200 'Jeden ON If Speed_button_1 = Wcisniety And Speed_button_2 = Puszczony And Speed_button_3 = Puszczony Then Max_speed = 150 If Speed_button_1 = Puszczony And Speed_button_2 = Puszczony And Speed_button_3 = Wcisniety Then Max_speed = 150 If Speed_button_1 = Puszczony And Speed_button_2 = Wcisniety And Speed_button_3 = Puszczony Then Max_speed = 150 'Wszystkie OFF If Speed_button_1 = Puszczony And Speed_button_2 = Puszczony And Speed_button_3 = Puszczony Then Max_speed = 100 If Speed_button_1 = Puszczony And Speed_button_2 = Puszczony And Speed_button_3 = Puszczony Then Max_speed = 100 If Speed_button_1 = Puszczony And Speed_button_2 = Puszczony And Speed_button_3 = Puszczony Then Max_speed = 100 Locate 2 , 8 If Max_speed = 255 Then Lcd "100%" If Max_speed = 200 Then Lcd "80% " If Max_speed = 150 Then Lcd "60% " If Max_speed = 100 Then Lcd "40% " Pwm1a = Max_speed Pwm1b = Max_speed Zakret = 177 Ostry_zakret = 0 If Start_button = Wcisniety Then Waitms 25 If Start_button = Wcisniety Then Exit Do End If Loop Do Loop Until Start_button = Puszczony Gosub Eliminacja_drgan Return Eliminacja_drgan: Waitms 20 Return Czas_cofania: Waitms 150 Return Prosto: Pwm1a = Max_speed Pwm1b = Max_speed Return Lekko_w_prawo: If Cz1 = Linia Then Skret_p(1) = 1 Else Skret_p(1) = 0 If Cz2 = Linia Then Skret_p(2) = 1 Else Skret_p(2) = 0 If Cz3 = Linia Then Skret_p(3) = 1 Else Skret_p(3) = 0 If Cz4 = Linia Then Skret_p(4) = 1 Else Skret_p(4) = 0 If Cz5 = Linia Then Skret_p(5) = 1 Else Skret_p(5) = 0 If Cz6 = Linia Then Skret_p(6) = 1 Else Skret_p(6) = 0 Pwm1a = Max_speed Pwm1b = Zakret Prawy_ostry_ostatni = 0 Lewy_ostry_ostatni = 0 Prawy_ostatni = 1 Lewy_ostatni = 0 Return Lekko_w_lewo: If Cz1 = Linia Then Skret_l(1) = 1 Else Skret_l(1) = 0 If Cz2 = Linia Then Skret_l(2) = 1 Else Skret_l(2) = 0 If Cz3 = Linia Then Skret_l(3) = 1 Else Skret_l(3) = 0 If Cz4 = Linia Then Skret_l(4) = 1 Else Skret_l(4) = 0 If Cz5 = Linia Then Skret_l(5) = 1 Else Skret_l(5) = 0 If Cz6 = Linia Then Skret_l(6) = 1 Else Skret_l(6) = 0 Pwm1a = Zakret Pwm1b = Max_speed Prawy_ostry_ostatni = 0 Lewy_ostry_ostatni = 0 Prawy_ostatni = 0 Lewy_ostatni = 1 Return Ostro_w_prawo: Pwm1a = Max_speed Pwm1b = Max_speed Right_motor_przod = Stoi Waitms 15 Right_motor_tyl = Jedzie Do Loop Until Cz3 = Linia Or Cz5 = Linia Right_motor_tyl = Stoi Waitms 15 Right_motor_przod = Jedzie Prawy_ostry_ostatni = 1 Lewy_ostry_ostatni = 0 Prawy_ostatni = 0 Lewy_ostatni = 0 Return Ostro_w_lewo: Pwm1a = Max_speed Pwm1b = Max_speed Left_motor_przod = Stoi Waitms 15 Left_motor_tyl = Jedzie Do Loop Until Cz3 = Linia Or Cz2 = Linia Left_motor_tyl = Stoi Waitms 15 Left_motor_przod = Jedzie Prawy_ostry_ostatni = 0 Lewy_ostry_ostatni = 1 Prawy_ostatni = 0 Lewy_ostatni = 0 Return Zawracanie_w_prawo: Pwm1a = Max_speed Pwm1b = Max_speed Right_motor_przod = Stoi Waitms 15 Right_motor_tyl = Jedzie Do Loop Until Cz3 = Linia Or Cz5 = Linia Right_motor_tyl = Stoi Waitms 15 Right_motor_przod = Jedzie Prawy_ostry_ostatni = 1 Lewy_ostry_ostatni = 0 Prawy_ostatni = 0 Lewy_ostatni = 0 Return Zawracanie_w_lewo: Pwm1a = Max_speed Pwm1b = Max_speed Left_motor_przod = Stoi Waitms 15 Left_motor_tyl = Jedzie Do Loop Until Cz3 = Linia Or Cz2 = Linia Left_motor_tyl = Stoi Waitms 15 Left_motor_przod = Jedzie Prawy_ostry_ostatni = 0 Lewy_ostry_ostatni = 1 Prawy_ostatni = 0 Lewy_ostatni = 0 Return Program był pisany 3 dni. Przejazdy robota na zawodach to maksimum jego możliwości. Przy większej prędkości robot wylatuje z trasy ze względu na jego ogromną masę. Jeśli coś pominąłem/czegoś brakuje to proszę o info na PW. Chętnie odpowiem na wszelkie pytania. __________ Komentarz dodany przez: Treker Publikacja dopiero po dodaniu zdjęcia jako załącznik. Przydałby się również większy wstęp, który będzie widoczny na portalu oraz w katalogu 🙂 follow the line.sch czujnikrobot v2.0.brd IzyboT.brd 8 Cytuj Link do komentarza Share on other sites More sharing options...
bartek1333 Marzec 26, 2012 Udostępnij Marzec 26, 2012 Ostatni plik .brd coś się nie chce otworzyć. 😐 Cytuj Link do komentarza Share on other sites More sharing options...
ProeXtreme Marzec 26, 2012 Autor tematu Udostępnij Marzec 26, 2012 U mnie się otwiera. Jaką masz wersję eagle? Cytuj Link do komentarza Share on other sites More sharing options...
bartek1333 Marzec 26, 2012 Udostępnij Marzec 26, 2012 Pozostałe pliki się normalnie otwierają, tylko z tym jest problem. Bład wyskakuje mniej więcej taki: Invalid data in file ( i ścieżka pliku). Więc to raczej nie dotyczy wersji Eagle. Cytuj Link do komentarza Share on other sites More sharing options...
Polecacz 101 Zarejestruj się lub zaloguj, aby ukryć tę reklamę. Zarejestruj się lub zaloguj, aby ukryć tę reklamę. Produkcja i montaż PCB - wybierz sprawdzone PCBWay! • Darmowe płytki dla studentów i projektów non-profit • Tylko 5$ za 10 prototypów PCB w 24 godziny • Usługa projektowania PCB na zlecenie • Montaż PCB od 30$ + bezpłatna dostawa i szablony • Darmowe narzędzie do podglądu plików Gerber Zobacz również » Film z fabryki PCBWay
ProeXtreme Marzec 26, 2012 Autor tematu Udostępnij Marzec 26, 2012 Spróbuj pobrać jeszcze raz ten plik oraz ten sam plik jeszcze raz dodany. Może któryś zadziała. Cytuj Link do komentarza Share on other sites More sharing options...
bartek1333 Marzec 26, 2012 Udostępnij Marzec 26, 2012 Spróbuj pobrać jeszcze raz ten plik oraz ten sam plik jeszcze raz dodany. Może któryś zadziała. Niestety żaden z nich nie działa. Ma ktoś jeszcze z tym problem? Cytuj Link do komentarza Share on other sites More sharing options...
rafi92 Marzec 26, 2012 Udostępnij Marzec 26, 2012 Witam takze mam problem z otwarciem tego pliku Udało mi się rozwiązać problem. Starczyło ściągnąć najnowszą wersje eagla(v 6) wcześniej korzystałem z 5 i ona nie chciała tego otworzyć. Cytuj Link do komentarza Share on other sites More sharing options...
ProeXtreme Marzec 26, 2012 Autor tematu Udostępnij Marzec 26, 2012 Sprawdźcie teraz ten plik. Powinien działać. Cytuj Link do komentarza Share on other sites More sharing options...
bartek1333 Marzec 26, 2012 Udostępnij Marzec 26, 2012 OK teraz ładnie chodzi. To teraz pytanie dot. płytki. Napisałeś, że sam robiłeś płytkę termotransferem. A w jaki sposób robiłeś przelotki? I czy możesz dać dokładniejsze foto przelotek? Cytuj Link do komentarza Share on other sites More sharing options...
ProeXtreme Marzec 26, 2012 Autor tematu Udostępnij Marzec 26, 2012 Przelotki robiłem drutem tzn.: - wierciłem otwór na przelotkę,- wkładałem drut do otworu,- lutowałem jeden koniec drutu do via,- odcinałem nadmiar drutu,- lutowałem drugi koniec drutu do drugiej warstwy PCB. Zabawy trochę było, ale połączenie przelotek jest przynajmniej pewne. 2 Cytuj Link do komentarza Share on other sites More sharing options...
rafi92 Marzec 26, 2012 Udostępnij Marzec 26, 2012 mam pytanie dotyczące pinów SV1,3,4,5 które są z którymi są połączone i w jaki sposób mogę je zastąpić ścieżką. Domyślam się ze 1 i 3 są połączone razem. a co z 4 i 5?? Cytuj Link do komentarza Share on other sites More sharing options...
ProeXtreme Marzec 26, 2012 Autor tematu Udostępnij Marzec 26, 2012 rafi92, którego SV dotyczy Twoje pytanie? Cytuj Link do komentarza Share on other sites More sharing options...
rafi92 Marzec 26, 2012 Udostępnij Marzec 26, 2012 Już doczytałem w schemacie przepraszam za kłopot. Cytuj Link do komentarza Share on other sites More sharing options...
ProeXtreme Marzec 26, 2012 Autor tematu Udostępnij Marzec 26, 2012 Nic nie szkodzi 🙂 W razie wątpliwości pytaj:) Cytuj Link do komentarza Share on other sites More sharing options...
bartek1333 Marzec 26, 2012 Udostępnij Marzec 26, 2012 Jakiem wiertłem wiercisz otwory pod przelotki? I jaki to jest drut - jakiś specjalny cienki, czy np. kocówki rezystorów? Cytuj Link do komentarza Share on other sites More sharing options...







Pomocna odpowiedź
Dołącz do dyskusji, napisz odpowiedź!
Jeśli masz już konto to zaloguj się teraz, aby opublikować wiadomość jako Ty. Możesz też napisać teraz i zarejestrować się później.
Uwaga: wgrywanie zdjęć i załączników dostępne jest po zalogowaniu!