Przeszukaj forum
Pokazywanie wyników dla tagów 'l293d'.
Znaleziono 5 wyników
-
Mam problem z dwoma silnikami pochodzącymi z drona. Silniki szczotkowe 3.7V, 0.1A połączone z kontrolerem L293D. Źródło zasilania 12V (8x AA1.5V). Moim celem było sterowanie prędkością silników za pomocą komunikacji bluetooth (zasilany z arduino 5v). Sam moduł udało się skutecznie podłączyć bez większych przesekód, lecz sterowanie silnikami okazało się już przeszkodą. Po podłączeniu do kontrolera dwóch silników na wyjściach zmierzyłem jakieś 2.5V przy PWM 255. Gdy odłączyłem jeden silnik było trochę lepiej lecz nadal nie było 3.7V. Kontroler został podłączany zgodnie ze schematem (kilka razy). Co wtakim wypadku trzeba poczynić? 2. Dodatkowe pytanie Przy okazji bawienia się silnikami wpadłem na pomysł zasilenia silnika przez stabilizator liniowy LM7805 po prawidłowym podłączeniu wszystkich elementów pomiar z silnika wskazywał 0.6V. Co się stało z resztą napięcia i co trzeba zrobić by otrzymać 3.7V?

-

Niepoprawne działanie silników z L293D podłączonego do Arduino UNO
Dabz opublikował temat w Arduino i ESP
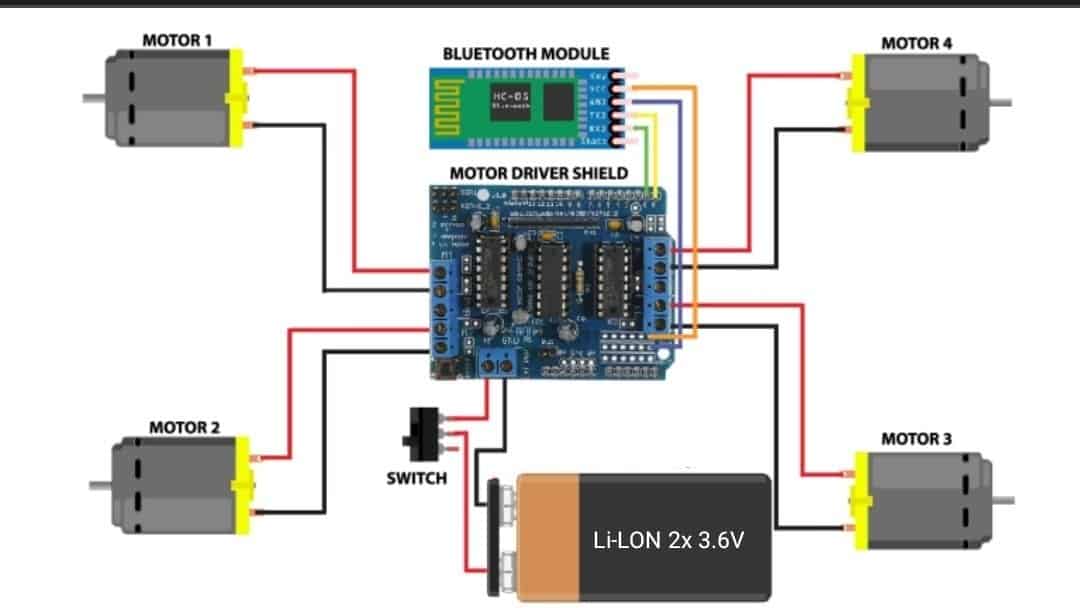
Witam wszystkich, na wstępie zaznaczę, że jestem początkującym elektronikiem oraz robię projekt do szkoły. Owym projektem jak wspomniałem w tytule jest autko na bazie Arduino UNO, L293D i modułu bluetooth HC-05 Sugerując się poradnikami postanowiłem zrobić projekt i podłączyć go według schematu poniże Już na początku napotkałem pewne problemy, ponieważ podłączenie zasilania na samą płytkę L293D (płytka jest wpięta bezpośrednio w Arduino) moduł HC-05 nie dział, więc rozdzieliłem kable i podłączyłem osobno L293D i Arduino UNO z jednego akumulatora i teoretycznie zadziałało. Lecz jak wgrałem kod (wszystko jak należy RX, tx zmieniłem i wyjąłem przed programowaniem) i połączyłem z aplikacją działa mi tylko przycisk tył i prawo. Jak klikam lewo i przód silniki zaciskają się i autko jedzie bez przerwy, a sam moduł się rozłącza i gubi zasięg z aplikacją. W czym może być problem???? Tutaj podsyłam jeszcze kod #include <AFMotor.h> //initial motors pin AF_DCMotor motor1(1); AF_DCMotor motor2(2); AF_DCMotor motor3(3); AF_DCMotor motor4(4); char command; void setup() { Serial.begin(9600); //Set the baud rate to your Bluetooth module. } void loop(){ if(Serial.available() > 0){ command = Serial.read(); Stop(); //initialize with motors stoped //Change pin mode only if new command is different from previous. //Serial.println(command); switch(command){ case 'F': forward(); break; case 'B': back(); break; case 'L': left(); break; case 'R': right(); break; } } } void forward() { motor1.setSpeed(255); //Define maximum velocity motor1.run(FORWARD); //rotate the motor clockwise motor2.setSpeed(255); //Define maximum velocity motor2.run(FORWARD); //rotate the motor clockwise motor3.setSpeed(255);//Define maximum velocity motor3.run(FORWARD); //rotate the motor clockwise motor4.setSpeed(255);//Define maximum velocity motor4.run(BACKWARD); //rotate the motor anti-clockwise } void left() { motor1.setSpeed(255); //Define maximum velocity motor1.run(BACKWARD); //rotate the motor anti-clockwise motor2.setSpeed(255); //Define maximum velocity motor2.run(BACKWARD); //rotate the motor anti-clockwise motor3.setSpeed(255); //Define maximum velocity motor3.run(FORWARD); //rotate the motor clockwise motor4.setSpeed(255); //Define maximum velocity motor4.run(FORWARD); //rotate the motor clockwise } void right() { motor1.setSpeed(255); //Define maximum velocity motor1.run(FORWARD); //rotate the motor clockwise motor2.setSpeed(255); //Define maximum velocity motor2.run(FORWARD); //rotate the motor clockwise motor3.setSpeed(255); //Define maximum velocity motor3.run(BACKWARD); //rotate the motor anti-clockwise motor4.setSpeed(255); //Define maximum velocity motor4.run(BACKWARD); //rotate the motor anti-clockwise } void Stop() { motor1.setSpeed(0); //Define minimum velocity motor1.run(RELEASE); //stop the motor when release the button motor2.setSpeed(0); //Define minimum velocity motor2.run(RELEASE); //rotate the motor clockwise motor3.setSpeed(0); //Define minimum velocity motor3.run(RELEASE); //stop the motor when release the button motor4.setSpeed(0); //Define minimum velocity motor4.run(RELEASE); //stop the motor when release the button }
-
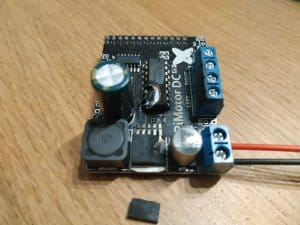
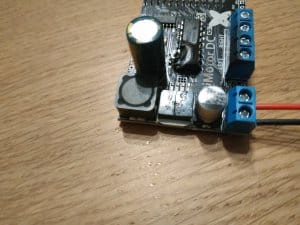
Cześć Wam, A więc od początku 🙂 Zbudowałem platformę robota z Raspberry Pi Zero na pokładzie. Do RPi podłączyłem płytkę PiMotor z L293DNE na pokładzie. Silniki zasilałem 4 bateriami NIMH co dawało z grubsza 5 V na wejściu do L293D. Niestety na mostku przez straty napięcia na silnikach napięcie wynosiło 3 V, przez co trochę brakowało mocy; optimum to 4.5V dla silników ( DAGU DG01D). Generalnie robocik jeździł. Ale... wpadłem na pomysł, aby podłączyć baterię LiPo 7.4 V 2S 20C /40C burst, (1100 mAh) licząc na optymalniejsze napięcie pracy silników. W zamian... usłyszałem huk, ujrzałem dym i ogień na układzie L293D oraz rozerwaną przetwornicę step-down TS2596 🙂 Ponieważ nie mam dużego doświadczenia z LiPO, chciałbym Was podpytać, co poszło "nie tak"? Polarność podłączona na 100% OK. Czyżby na układ poszedł jakiś potężny prąd z LiPO? Niby dlaczego? Będę wdzięczy za odpowiedź. Poniżej zdjęcia z "eksperymentu" 🙂 P.S. RPi przeżyło ten szok!
-
Dzień dobry, Jest to mój pierwszy wpis na forum, szukałem wcześniej podobnego tematu ale go nie znalazłem, tak więc zakładam nowy. Steruję silnikiem DC za pomocą sterownika L293D, połączenie jest poprawne, steruję "ręcznie" silnikiem , więc od tej strony wszystko działa, problem pojawił się przy programowaniu STMki. Korzystając z kursu STM32 F1 HAL #4 porty GPIO próbuję wystawić sygnał sterujący silnikiem lecz pozostaje on w stanie wysokim. Jeżeli zmienię PIN na diodę LED PC13 to ta działa poprawnie. Co zrobić aby dany PIN zmieniał swój stan? while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_SET); HAL_Delay(500); HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_RESET); HAL_Delay(500); } /* USER CODE END 3 */ }
-
Witajcie, Pisze na forum gdyż ciężko znaleźć mi odpowiedź na moje pytanie. Zastanawiam się jak bezpiecznie połączyć taki zestaw: Raspbbery Pi na stałe połączony przez kabel USB z Arduino Uno (Komunikacja przez Firmate - python) Arduino Pi podłączony ma do siebie L293D i dwa silniki DC - wszystko działa dobrze, aczkolwiek silniki (pompki) maja za mało mocy. Zastanawiam się jak w bezpieczny sposób wprowadzić dodatkowe zasilanie 12V? - Czy podłączając: 1. Baterie Vcc +12V --> Pin16 z L293D 2. GND z baterii --> Pin4,5,12,13 z L293D Nie ugotuje niczego, czy powinienem zrobić jakieś dodatkowe zabezpieczenia?