skmskm
-
Zawartość
422 -
Rejestracja
-
Ostatnio
-
Wygrane dni
21
Ostatnio na profilu byli





Osiągnięcia użytkownika skmskm
")





-
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Przyznam że Niewiedziałem że takie są. Płytka nie jest mojego projektu to gotowiec ma pola z otworami do prototypowania i jest tania. Servo Shield PWM PCA9685 i2c - 37zł Niestety plus jest pośrodku co utrudniło by montaż bezpieczników. -
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Nie dam rady zamontować musiał bym robić płytkę od zera. za to znalazłem wersje tht na allegro. -
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Niestety zaś straciłem jedno servo w trakcie testów servo dotknęło obudowy i się przeciążyło. Ciekawe że one nie mają żadnych zabezpieczeń. Prąd zatrzymanego wału miał być 3.9A gdyby nie zasilacz laboratoryjny który zatrzymał prąd na 8A to by się chyba zapaliło/zniszczyło baterie, niestety mosfety dały rade wypalić w płytce dziurę. Zamówione nowe plus termistory, przerobie elektronike tak by każde servo miało jednego 3A 5ohm, nie wiem czy warto jeszcze coś dodać. -
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Wykrakałeś spaliło się jedno servo tylko ciekawe że było na 8.4V ja miałem 7.9V, silnik padł. model to D5545GS i musze zmienić MG995(4sztuki) serwa na coś lepszego są beznadziejne. -
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
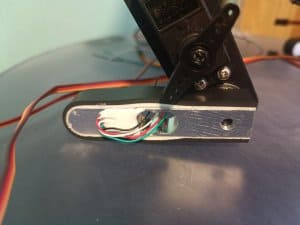
Tu masz zdjęcie żebyś przypadkiem złego modelu nie kupił ma być od 0.1mm.
-
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Większość serw zamontowanych działa na wyższym napięciu tylko te natnie nie, najwyżej wymienię. Zaciskarka to HT-202B na końcówce ma płaską powierzchnie i nią zaciskałem linki. Do końcówek mam lepszą HOGERT HT1P200 zaciska obie części naraz i nadaje się do mini konektorów takich jak w Arduino/drukarkach. -
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
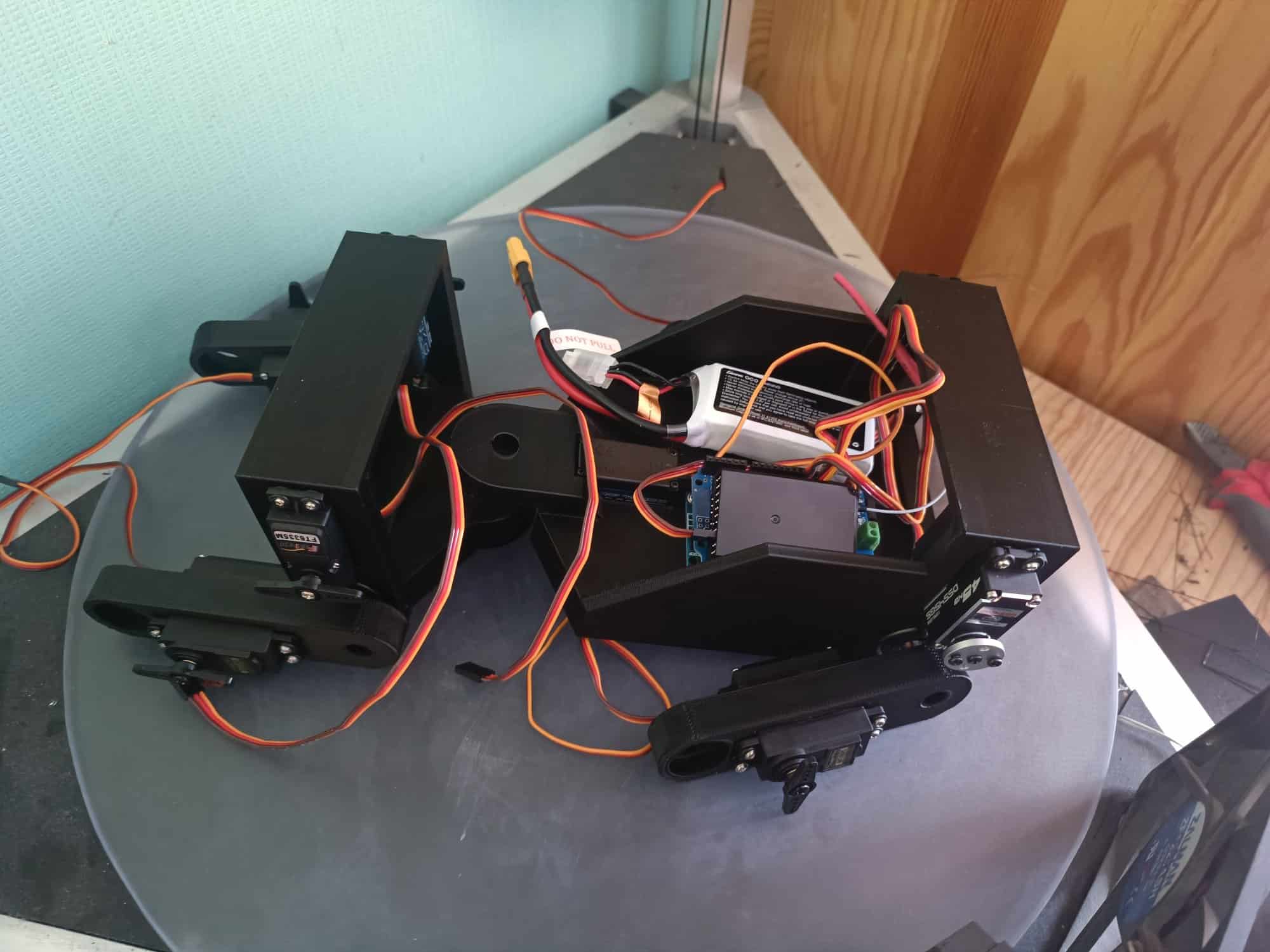
Postępy w budowie, zrobiłem łączniki servo->noga, sterowanie elektroniki: Już puściłem wszystkie serwa w ruch działają przy 8.4V choć na niektórych jest do 6V
-
Tak zrobiłem go: I domontowałem do boku tokarki mikroskop cyfrowy z monitorem:


-
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
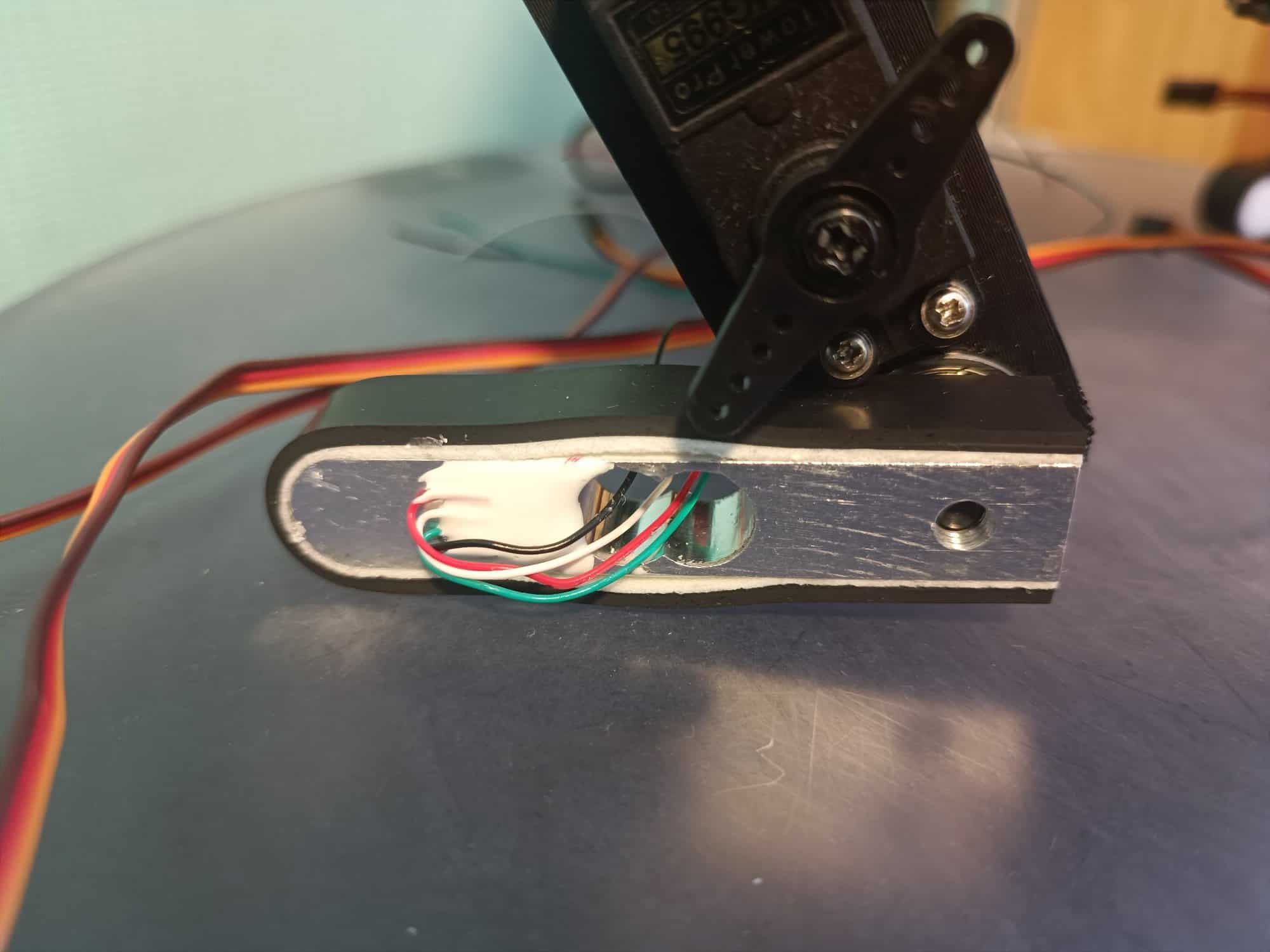
Prze frezowałem tensometry na kształt końcówek nóg.
-
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Serwa są na 7.4V wiec nic nie trzeba. -
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Pobór ze 10A(orientacyjny), zasilane z ogniwa li-pol 2200MAh 7.4V. -
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Złożyłem robota: Brakuje mu jeszcze końcówek nóg i sterowania.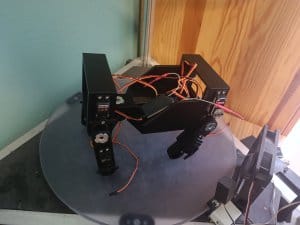
-
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Wydrukowałem nogi/ramę...
-
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
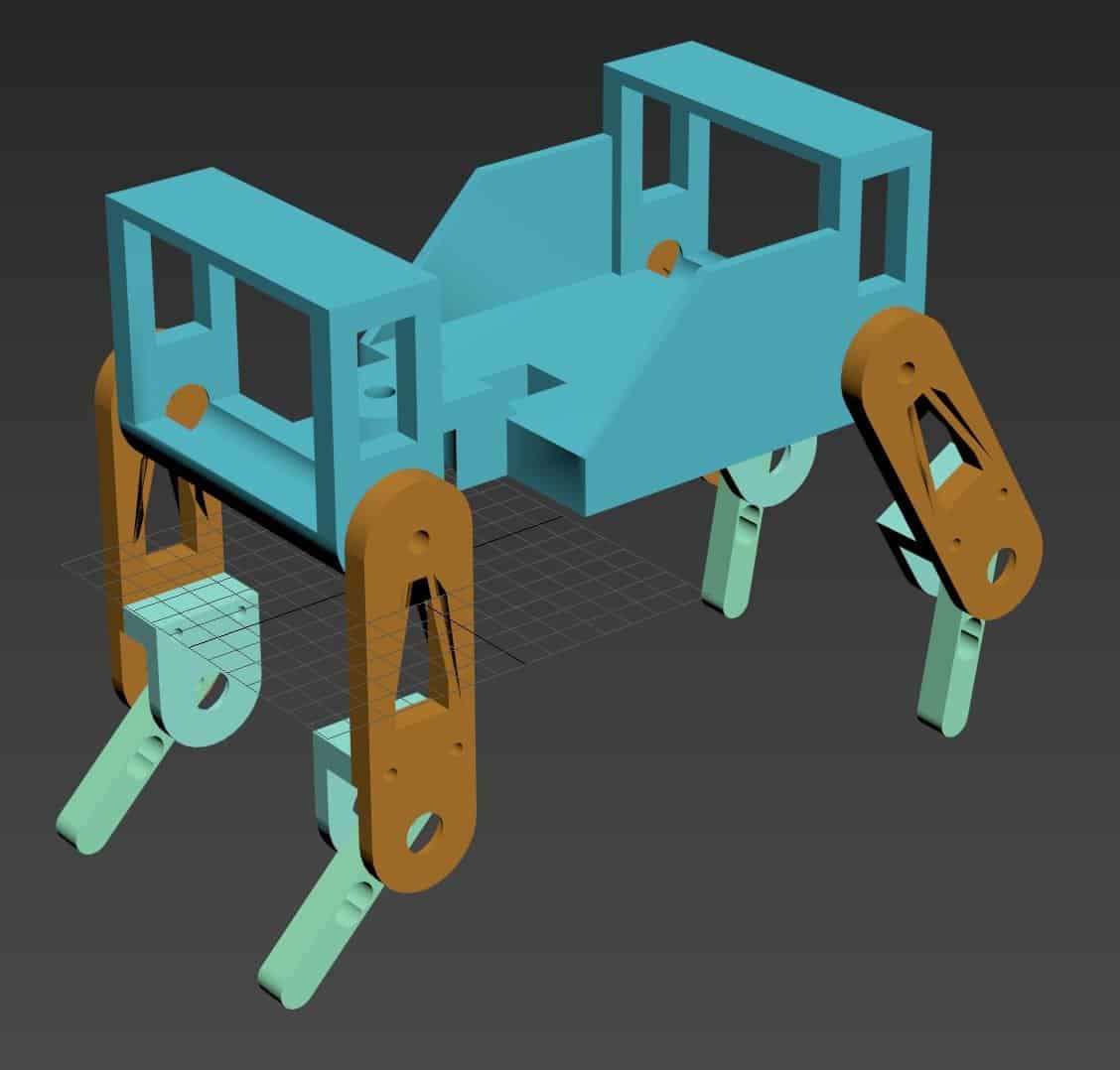
Zrobiłem wstępny projekt jak to będzie wyglądało. Nogi całe z alu będą korpus drukowany. Długość/szerokość/wysokość 220mm/130mm/200mm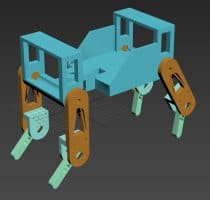
-
Robot walker 4 nożny
skmskm odpisał w temacie użytkownika skmskm • Projekty - DIY w budowie (worklogi)
Na razie brak projektu ale serwa policzyłem tak by muc każdą z nóg podnieść dwa razy więcej niż waga robota. Serwa 35Kg 2 szt(przód) i 45Kg 2 sztuki(tył). Reszta po 13Kg. Na skręt 25Kg. Większość cyfrowe, tylko te 13Kg analogowe. Obliczyłem że teoretycznie 2.7Km/h max osiągnie. Liczę na możliwość skoku, kilka cm mnie zadowoli.