RaV
-
Zawartość
250 -
Rejestracja
-
Ostatnio
-
Wygrane dni
5
Ostatnio na profilu byli
843 wyświetleń profilu





Osiągnięcia użytkownika RaV
")





-
Płytka dla zielonego devOpsa w FPGA
RaV odpisał w temacie użytkownika lukezaa • Układy programowalne
Jakbyś chciał lutować własną płytkę to Intel Max10 mają przyjazne obudowy. Największa FPGA z tej serii w FQFP144 ma 50k elementów logicznych. Więc trochę tam już się zmieści. -
Zaprojektować 3-bitowy rejestr szeregowy przesuwny w lewo i w prawo
RaV odpisał w temacie użytkownika adrian2115 • Sprawdzanie schematów
Nie wiem, czy mogę to tu zostawić, ale to pytanie było natchnieniem dla mojego ostatniego odcinka: -
Zaprojektować 3-bitowy rejestr szeregowy przesuwny w lewo i w prawo
RaV odpisał w temacie użytkownika adrian2115 • Sprawdzanie schematów
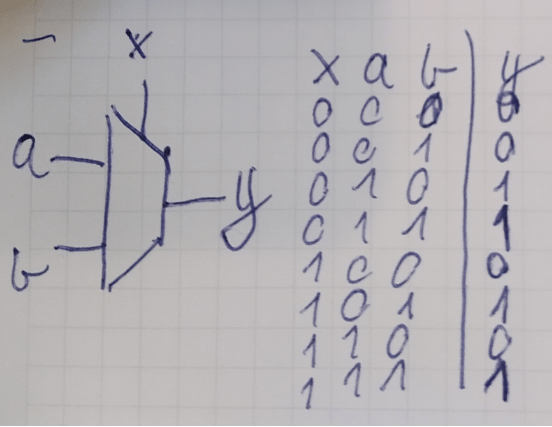
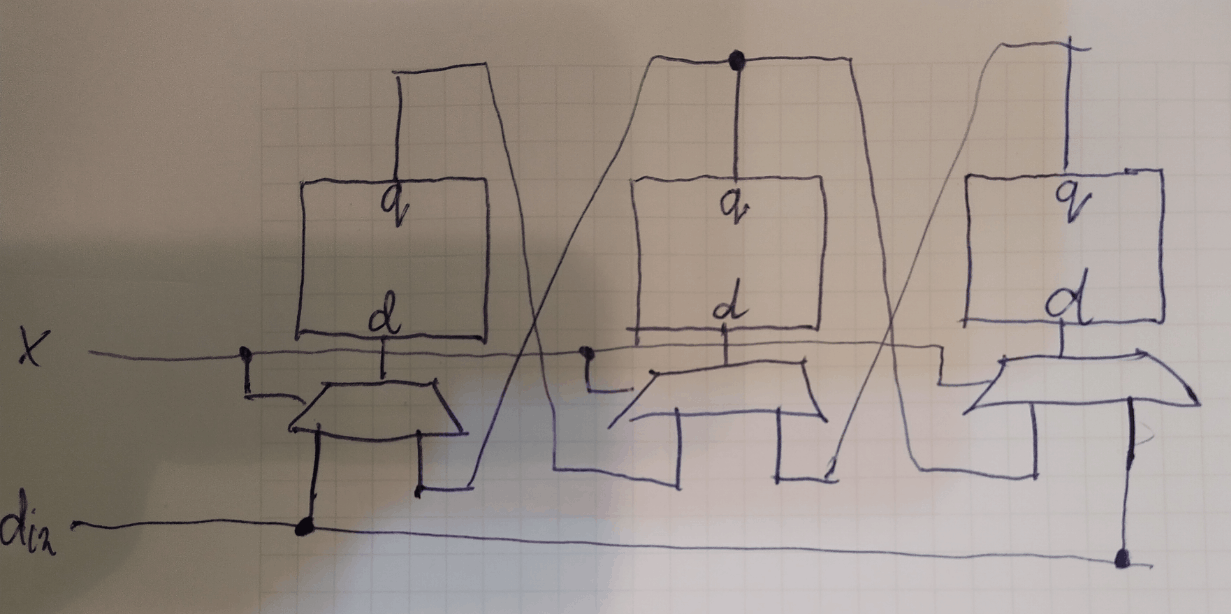
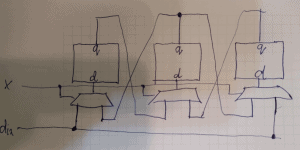
Samego programu MicroCap nie znam. Ale myślę, że mogę trochę doradzić odnośnie samej logiki rozwiązania. Wejście x nie wchodzi na rejestr przesuwny. To jest osobne wejście sterujące. Na dalszych schematach wejście rejestru oznaczę jako d_in. Mamy zmieniać kierunek, więc musimy mieć wybór czy na wejście danego rejestru wchodzi wartość z rejestru lewego, czy prawego. Logiką która to robi jest tak zwany multiplekser. Na podstawie wejścia sterującego x wybiera czy na wyjściu będzie wejście a, czy b (nam wystarczy z dwoma wejściami "danych" i jednym sterującym). Mimo, że na pierwszy rzut oka nie wygląda, multiplekser jest tak naprawdę zwykłą funkcją logiczną i można go złożyć z bramek. Jako podpowiedź załączam jego tablicę prawdy: A jak już mamy multiplekser, to możemy stworzyć rejestr przesuwający w obie strony. Dla mnie bardziej intuicyjne było narysowanie przerzutników odwróconych o 90 stopni w kierunku przeciwnym do ruchu wskazówek zegara: Pozostaje zamienienie multiplekserów na bramki logiczne realizujące tą samą funkcję, oraz ustalenie gdzie jest prawo, a gdzie lewo 🙂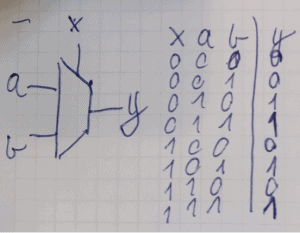
-
Raspberry Pi 4 z 8 GB pamięci RAM trafiło do sprzedaży!
RaV odpisał w temacie użytkownika Komentator • Wiadomości
Jakby PCI wyprowadzili na zewnątrz... -
Kurs FPGA - #3 - instalacja środowiska ISE Xilinx
RaV odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
W sumie to już jest Intel 🙂 Quartus śmiga na Linuxie i Windowsie. -
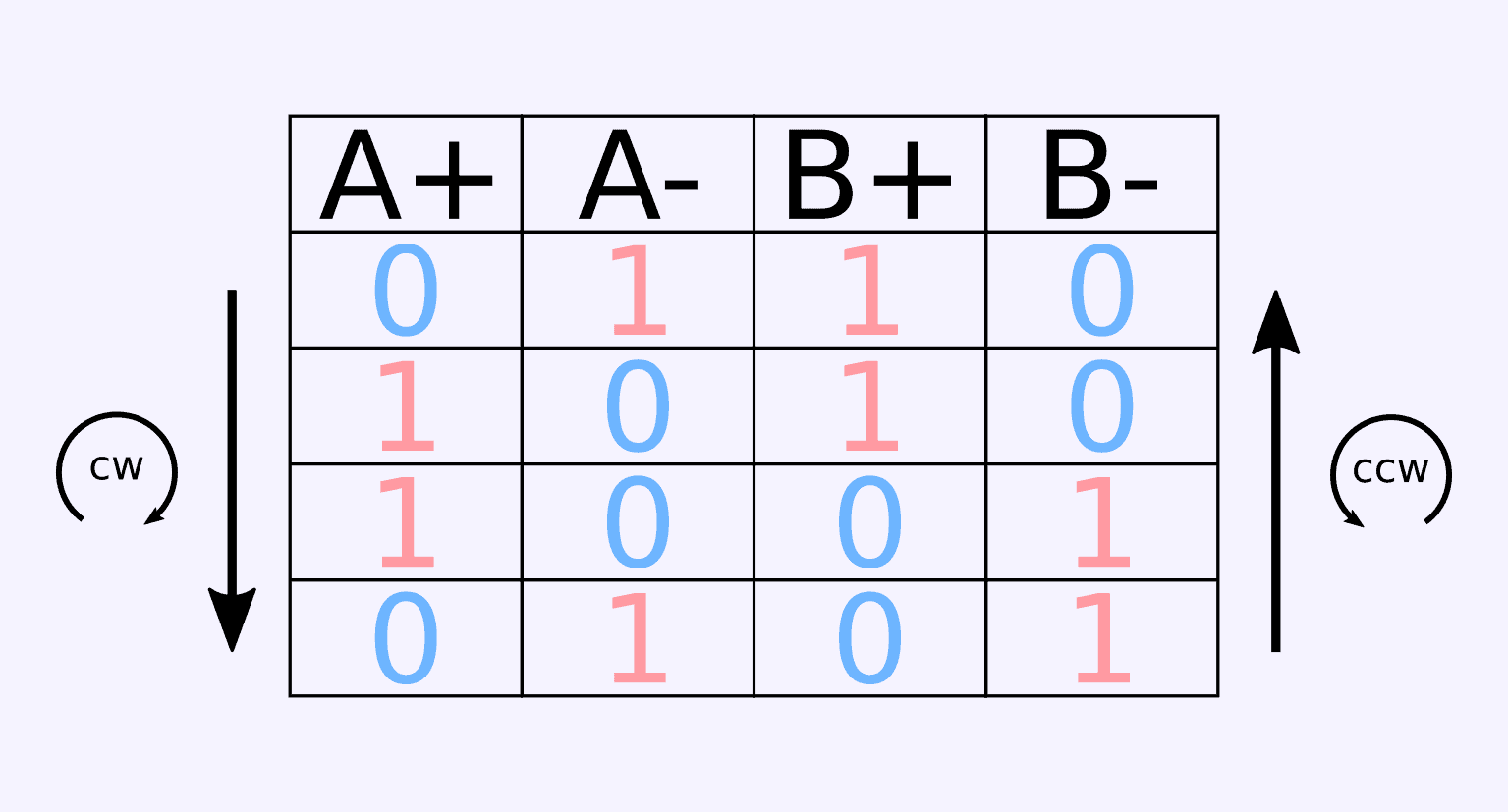
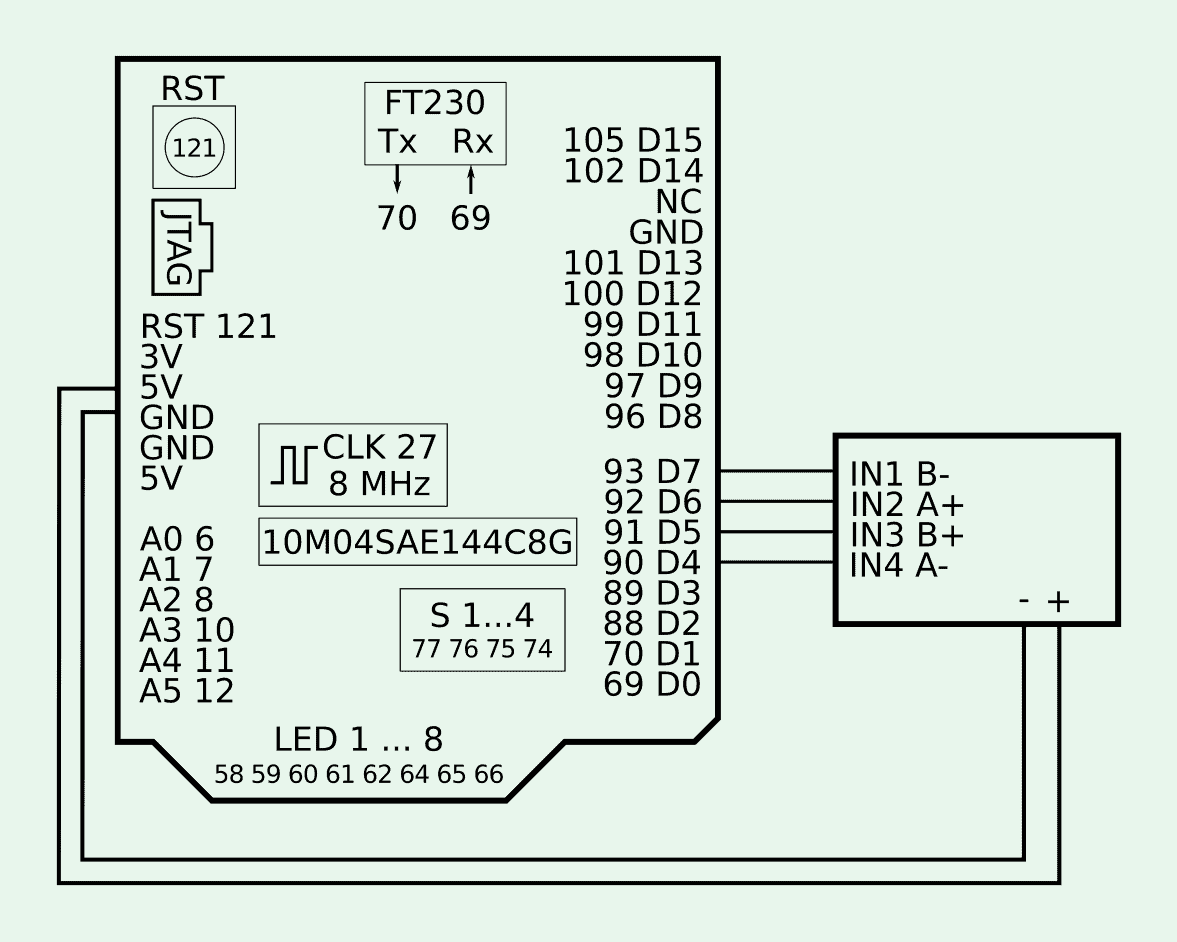
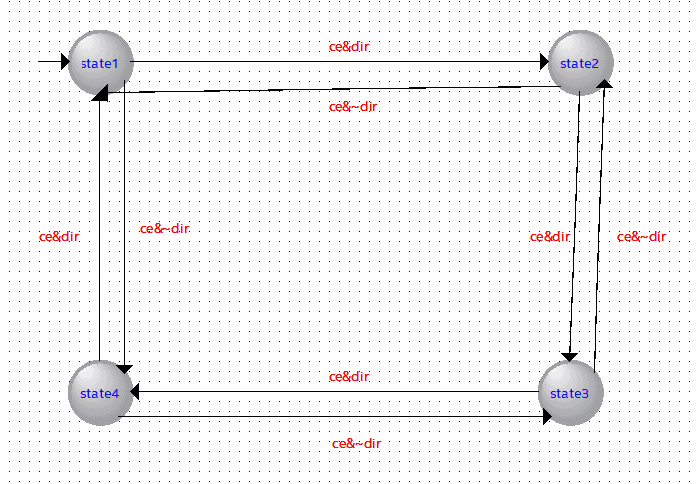
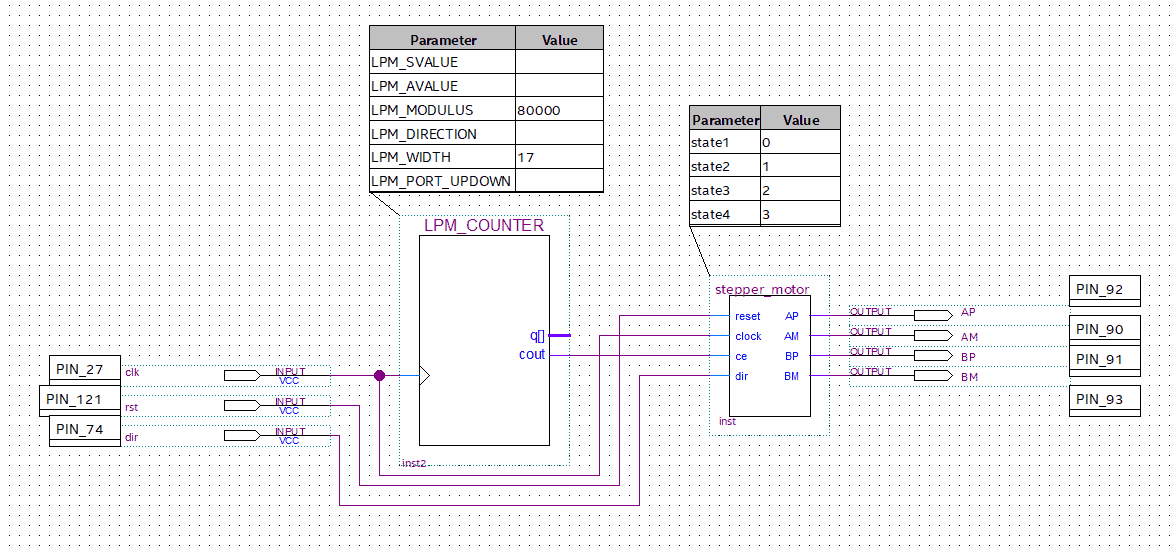
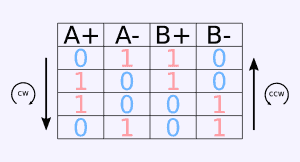
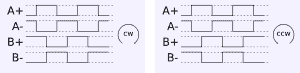
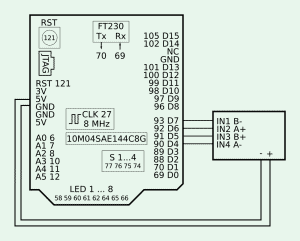
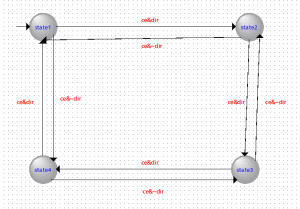
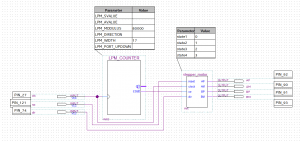
Układy FPGA wydają się trochę bardziej tajemnicze niż mikrokontrolery. Można jednak dość szybko rozpocząć z nimi przygodę za pomocą narzędzi graficznych. W tutorialu przyjrzymy się układowi z rodziny Max10 znanej firmy Intel. Wykorzystamy go do sterowania silnikiem krokowym. Gotowy prototyp przedstawia Rys. 1. Rys. 1. Zmontowany prototyp. Składamy sprzęt W projekcie wykorzystamy płytkę Rysino z stosunkowo niewielkim układem z rodziny 10M04. Podłączymy do niej silnik krokowy 28BYJ-48 poprzez sterownik zbudowany z wykorzystaniem popularnego układu ULN2003. Nasz silnik składa się z dwóch uzwojeń. Każde z nich ma w połowie wyprowadzony odczep. Kolory z rysunku odpowiadają kolorom przewodów zamontowanych w użytym modelu. Obrót silnika następuje, gdy zmieniamy ich polaryzację poprzez zasilenie złącza +, albo złącza -. W tym projekcie skorzystamy z najprostszego typu sterowania zwanego pełno krokowym. Rys. 2. Stany na cewkach silnika. Rys. 3. Przebiegi czasowe na cewkach silnika. Na Rys. 2. widzimy, że aby obracać silnik musimy po kolei ustawiać cztery różne kombinację napięcia na cewkach. Natomiast Rys. 3. pokazuje jak będą wyglądały przebiegi przedstawione w tabelce. Jeżeli będziemy przechodzić „z góry na dół” nasz silnik będzie wykonywał obroty zgodnie z kierunkiem ruchu zegara. Aby zmienić kierunek obrotu wystarczy przełączać stany w przeciwnym kierunku. Pojawia się tu słowo klucz: stan, które pozwoli nam wybrać sposób implementacji sterownika. Zbudujemy maszynę stanów. Ale najpierw podłączmy silnik do układu FPGA. Schemat połączenia pokazuje Rys. 4. To jego wykonania potrzebujemy przewodów połączeniowych. Rys. 4. Sposób połączenia płytki Rysino z sterownikiem silnika. Wsad dla układu FPGA Aby zbudować wsad dla układu FGPA potrzebujemy zintegrowane środowisko dostarczone przez producenta. Najpierw musimy jednak się zarejestrować. Następnie ze strony producenta pobieramy środowisko Quartus Prime Lite Edition. Ja korzystałem z wersji 18.1. Pobieramy: Quartus Prime (includes Nios II EDS) (1.7GB) MAX 10 FPGA device support. (330MB) Jak widzimy niestety są to dość duże pliki... Po instalacji możemy przejść do tworzenia projektu. Przygotujemy go w całości w narzędziach graficznych. Składa się on z dwóch głównych części. Najpierw przygotujemy maszynę stanów, którą widzimy na Rys. 5. Rys. 5. Maszyna stanów. Następnie umieścimy gotową maszynę w projekcie, dołożymy licznik zmniejszający szybkość przełączania stanów oraz wejścia i wyjścia. Gotowy schemat pokazuje Rys. 6. Rys. 6. Diagram gotowego projektu. Jednak opisywanie „wyklikiwania” poszczególnych elementów było by dość zagmatwane, dlatego przygotowałem film, w którym zobaczymy wszystko krok po kroku. A na samym końcu znajdziemy demonstrację działania gotowego projektu. Na końcu pozostaje już tylko podłączenie płytki do komputera za pomocą przewodu miniUSB. Do złącza JTAG podłączamy programator USB Blaster i wgrywamy nasz projekt. Cały projekt jest także dostępny w repozytorium.

-
- 2
-

-
- FPGA
- Silnik krokowy
- (i 3 więcej)
-
Dzięki za rady Sprawdziłem omomierzem połączenia. Masa jest zwarta z masą, a diody z + zasilania. Z diodami LED działa bez problemu. Sprawdziłem też innym egzemplarzem ULN2803, też nie działa. Czy możliwe jest że wina leży w wyprowadzeniach mikrokontrolera? Rozważam pocięcie płytki i dolutowanie do innych. --------------------------------- Rozwiązane, jednak popsute ULN2803, miałem w swoich zbiorach dwa zniszczone egzemplarze, z 3 działa... Bardzo dziękuję za pomoc
-
Buduje sterownik 3 silników krokowych oparty o stm32 oraz układy ULN2803 (po jednym na każdy silnik). Dwa działają bez problemu, natomiast z jednym występuje dziwny problem: przy odłączonym silniki wyjścia zachowują się normalnie: dla stanu niskiego jest 0V dla wysokiego około 3V, natomiast gdy podłącze silnik napięcie na pinie wzrasta do 0,5V co już powodóje zmianę stanu wyjść ULN2803. Czy macie pomysł czym może być spowodowane takie zachowanie?
-
Szukam kursu/przykładowego programu obsługi USB HID na mikrokontrolerze stm32f103c8.
-
Szukam sklepu internetowego, który oferuje rezystancyjne panele dotykowy o przekątnej co najmniej 10 cali.
-
Ale jak sterować takim napędem? Wirująca pralka porusza się dość losowo.
-
W jaki sposób są napędzane?
-
Szukam dokumentacji transoptora szczelinowego z drukarki HP przedstawionego na zdjęciu: Układ ma sześć wyjść.
-
Własnie nie mogę ich znaleźć, a L293D jest tani i łatwo dostępny. Jaki driver byś polecał?
-
Czy L293D nadaje się jako driver MOSFETów w mostku H?