wbhz
-
Zawartość
3 -
Rejestracja
-
Ostatnio
-
Wygrane dni
2
Osiągnięcia użytkownika wbhz
")





-
Wacku, Dzięki za porównanie robota do istoty ludzkiej. Wyjaśniam, że w intencji autora nie było stworzenie robota jako model towarzyski. Więc nie ma specjalnych powodów, aby sypiać z nim w jednym pokoju. świadczy o tym jego konstrukcja i widok ogólny. U mnie stoi w korytarzu i nie wygląda na obrażonego. Od czasu do czasu tylko kogoś przestraszy.


-
Zapraszam na moją stronę http://www.muzeumtechniki2006.republika.pl tam jest link moja konstrukcja i więcej zdjęć oraz kilka plików w Corelu do pobrania. Pozdrawiam ** Dodano: 2007-07-23, 11:53 ** Korpus jest zrobiony z elementów dawnego systemu akwizycji danych CAMAC. Po odkręceniu obudowy jest możliwość wkładania różnych płytek drukowanych w specjalne prowadnice, zależnie od potrzeb. Każda prowadnica zakończona jest wielostykowym złączem. Oczy są zrobione z selenowych ogniw fotoelektrycznych. Zastosowałem je dlatego, bo trochę przypominają tęczówkę. Dzięki nim robot może w przybliżeniu określić odległość od przeszkody i uruchomić odpowiedni algorytm np.ominięcia jej, ale trzeba pamiętać, że selen z czasem traci częściowo swoje właściwości... Pomysł pochodzi z książki pana Wojciechowskiego traktującej o zabawkach elektronicznych. Dodatkowo zastosowałem zwykły czujnik ruchu na podczerwieni pasywnej od urządzenia alarmowego. Dzięki za uznanie i pozdrawiam. ** Dodano: 2007-07-23, 12:18 ** Do budowy robota zainspirował mnie między innymi dawny film sf pt.Saturn 3. Tak, że Twoje spostrzeżenia są bardzo trafne. Film polecam obejrzeć. Oczywiście nie chodzi o inne wątki tylko o tego robota, który jest po prostu piękny. ** Dodano: 2007-07-23, 12:41 ** Kosztował przede wszystkim dużo czasu. Większość części została adoptowana od innych urządzeń elektronicznych i mechanicznych. Nie trzeba dużo pieniędzy, liczy się tylko pomysłowość. Klawiatura służy do programowania sterownika mikroprocesorowego zbudowanego na Z80. Najwięcej czasu pochłaniają prace mechaniczne. Bez pomocy tokarza nie obejdzie się. W chwili obecnej robot jest unieruchomiony z powodu potrzeby wytoczenia dwu osiek do silniczków napędowych. Bezskutecznie szukam warsztatu, który by to zrobił. Dlatego nie zamieszczam zdjęć dolnych partii konstrukcji, bo są częściowo rozebrane. Przekładnie, które wcześniej były eksploatowane z tworzywa sztucznego wytarły się, bo nie doceniałem zgubnej roli luzów pomiędzy trybami. Siły momentów obrotowych są jednak duże, zwłaszcza w chwili ruszania. ** Dodano: 2007-07-23, 13:01 ** Nad klawiszami i wyświetlaczem znajduje się głośnik, bo robocik posiadał wbudowaną niewielką aplikację z syntezatorem mowy. Niestety okazało się, że do pełnej realizacji pomysłu potrzebny jest komputer, duża ilość wstążek kabli i bardzo dobra znajomość programowania. Mimo wszystko trochę sobie po eksperymentowałem z efektem podobnym do tego, gdy superkomputer Hall budzi się ponownie do życia z głębokiego stanu nieświadomości. Pozdrawiam
-
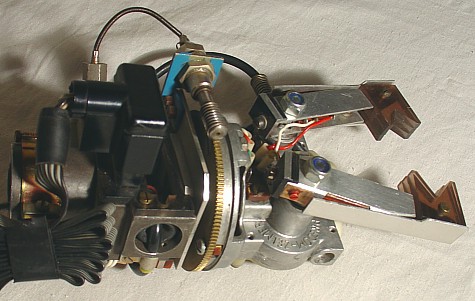
Początkowo miał to być robot kroczący, ale po kilku nieudanych próbach szybko przekonałem się, że wykonanie takiej konstrukcji w warunkach domowych jest prawie niemożliwe i zrezygnowałem z tego zamiaru. Robot porusza się na platformie jeżdżącej napędzanej przez dwa silniczki samochodowe podłączone do zasilacza tyrystorowego z transformatorem. Na platformie znajduje się też akumulator Głowa obraca się w obie strony przy pomocy dwóch silniczków krokowych HSI, (aby osiągnąć większy moment), które charakteryzują się niską rozdzielczością o typowych wartościach 32 kroki na obrót, dlatego dodatkowo zastosowano zwykłą przekładnię zębatą 1:10. Mechanizm posiada wyłącznik krańcowy odcinający zasilanie sterownika silników po osiągnięciu zadanego kąta obrotu. Początkowo miała być zastosowana przekładnia planetarna ze względu na wysoki moment napędowy, znikomy luz i niski poziom szumu. Ta, którą dysponowałem była zbyt ciężka, a trzeba pamiętać, że środek ciężkości musi znajdować się jak najniżej, bo konstrukcja może okazać się niestabilna. Ponadto głowa posiada dodatkowo trzy stopnie swobody, które zapewniają trzy siłowniki pneumatyczne (cylindry tłumikowe z tłokiem od dalekopisu), które są sterowane przez trzy miniaturowe elektrozaworki z teflonu. Dla obu rąk zastosowałem zdublowany system w postaci elementu wykonawczego (siłownik pneumatyczny 212cm3/skok tłoka 4,7 cm - z demobilu) z wbudowanym potencjometrem kontrolnym w celu pozycjonowania. Oba siłowniki sterowane są przez bardzo precyzyjne sterowniki elektromechaniczne (chyba lotnicze) z drgającą kotwicą i diafragmą oraz kapilarnie zwężająca się dyszą wylotową. Częstotliwość drgań określa strumień powietrza. Zarówno głowa jak i ręce sterowane są za pomocą joysticka. W fazie początkowej do sterowania próbowałem zastosować system komputerowy CA 80 (z Z80A) z odpowiednim algorytmem działania oraz zwykłego PC 386 z odpowiednim oprogramowaniem i dodatkową kartą wkładaną w wolny slot. Wtedy cała konstrukcja rozrastała się do niebywałych rozmiarów, a miał to być robot kroczący. Robot posiada zbiornik sprężonego powietrza, który trzeba doładowywać. Akumulator starcza na kilkanaście minut jazdy. Ponadto posiada zasilacz impulsowy od PC do zasilania elektroniki np: sterowników silników krokowych typu AVT 2047A. Reaguje na światło i dźwięk. Próbowałem też eksperymentów z syntezatorem mowy, ale zrezygnowałem z powodu braku miejsca w korpusie na wciąż to nowe podzespoły. Praktycznie jest cały czas w trakcie niekończących się przeróbek i modernizacji