smilee
-
Zawartość
9 -
Rejestracja
-
Ostatnio
-
Wygrane dni
1
Osiągnięcia użytkownika smilee
")





-
Kurs STM32L4 – #11 – kolorowy wyświetlacz TFT (SPI)
smilee odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
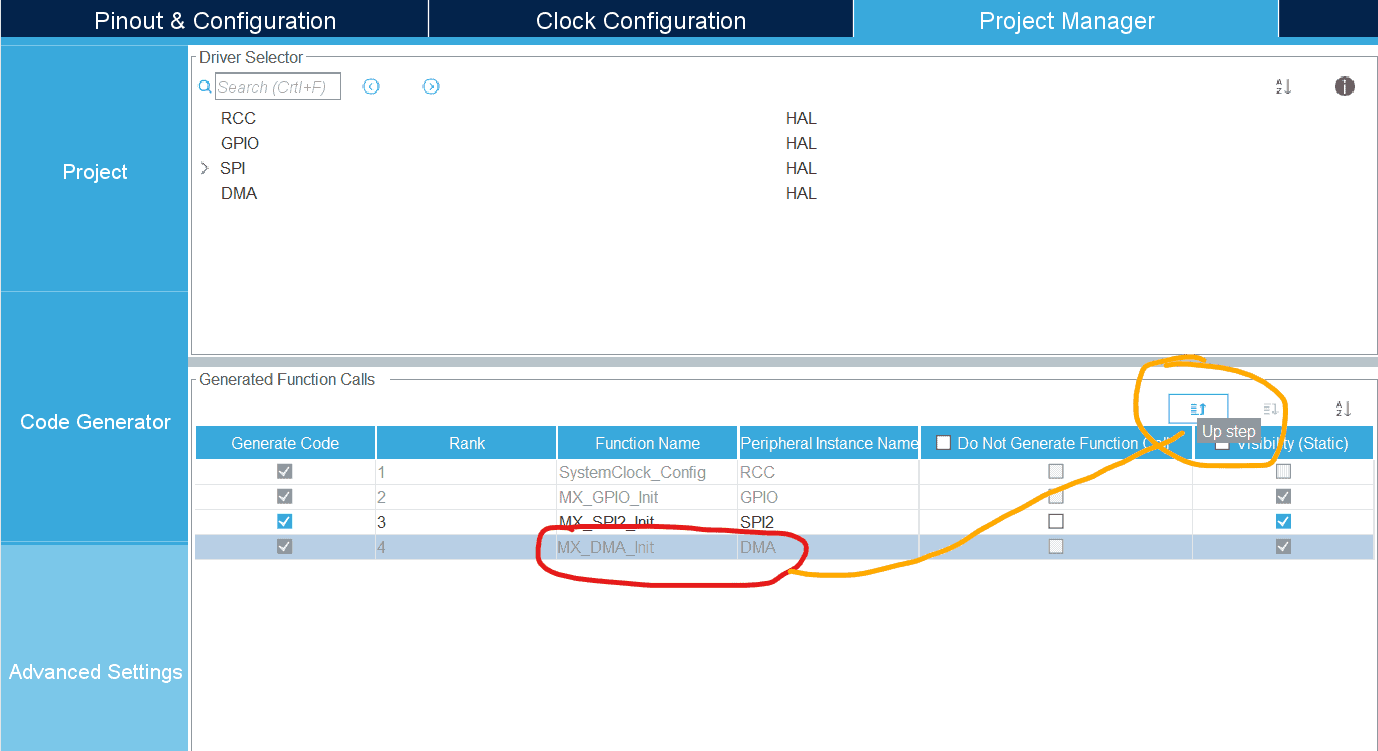
@Leroy ja mam dokładnie to samo. Po zaimplementowaniu DMA transmisja przestaje działać. Problem pojawia się w STM32CubeIDE Version 1.7.0, gdzie kod generowany robi nam kuku. Kod poniżej: /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_SPI2_Init(); MX_DMA_Init(); /* USER CODE BEGIN 2 */ Może się powtarzam, ale jeśli ktoś chce zacząć przygodę z tym kursem od tego momentu, to szkoda jego/jej czasu na poszukiwania, niech to będzie tutaj. Może sami twórcy mogliby nieco o tym problemie wspomnieć w głównej części kursu? Zwłaszcza jeśli używają starszej wersji CubeIDE (Tak, STM rozwiązał ten problem, po czym... powrócił do wersji która generuje taki właśnie kod). Problem ten pojawił się za każdym razem, kiedy chciałem użyć DMA (tak, przy UART oraz ADC też ten problem był obecny, więc wzmianka w tamtych częściach też by się przydała, żeby nie zniechęcać uczestników). Poniższy problem nie istnieje, po zamianie kolejności inicjalizacji, jak poniżej: /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_DMA_Init(); MX_SPI2_Init(); /* USER CODE BEGIN 2 */ Rozwiązanie: Nieoptymalne: Zmieniaj kolejność inicjalizacji za każdym razem, kiedy tylko dokonywałeś/aś jakichś updatów przez CubeMX Lepsze: otwórz CubeMX --> zakładka Project Manager, po lewej jest Advanced Settings, zaznacz MX_DMA_Init i znaczkiem po prawej przesuń kolejność inicjalizacji. (Upewnij się, że DMA zostało najpierw 'aktywowane' w innej części CubeMX, jeśli to nie zostało zrobione, DMA_Init nie będzie obecne na liście) Niestety, ten krok trzeba będzie wykonać dla każdego nowego projektu (ale tylko jeden raz).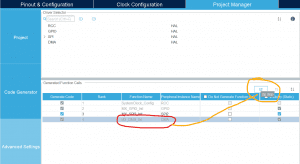
-
Kurs STM32L4 – #9 – przetworniki analogowo-cyfrowe (ADC)
smilee odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
No dobra, mam pierwsze wyniki z dochodzenia: CubeMX generuje kod po swojemu, a nie zawsze dobrze. Nie jestem pewien, czy to jakieś nieudokumentowane ficzery są, ale niejednokrotnie słyszałem słowa krytyki (od wieloletnich inżynierów oprogramowania embedded z którymi pracowałem) pod adresem owego narzędzia. Ale dość narzekań, teraz do rzeczy: W kodzie wygenerowanym przez CubeMX znajduję taką serię: /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_ADC1_Init(); MX_DMA_Init(); MX_USART2_UART_Init(); /* USER CODE BEGIN 2 */ I przy takim układzie DMA nie działa. Sprawdziłem w debuggerze: zwiększyłem bufor na dane do 64, jeden kanał, bez skanowania, bez UARTa, jednym słowem prostota do granic możliwości. Po podejrzeniu zawartości bufora, znajdujemy tam tylko jedną daną różną od zera (przy 'niezerowym' ustawieniu potencjomentru), na indeksie 0. Potem - same zera. I teraz, po utarczkach z innymi peryferialami, jak np USART vs DMA, znalazłem kod z USART-DMA działający, vs mój, przepisywany ręcznie i kompilowany na moim PC, po czym znalazłem jedną rzecz, która nie wydawała się być decydującą, ale spróbować warto. Zmieniłem to i... DZIAŁA! A co zmieniłem? Patrz poniżej: Wróciłem więc do tego przykładu i oto nowa, poprawiona wersja kodu, a w zasadzie kolejność linii: MX_GPIO_Init(); MX_DMA_Init(); MX_ADC1_Init(); MX_USART2_UART_Init(); Zamiana kolejności inicjalizacji modułu DMA i ADC1. W innym przykładzie miałem podobnie. USART nie chciał wypluwać danych z pomocą DMA dopóki nie zamieniłem tak, żeby najpierw był DMA_Init() a potem USART_Init(). Do kolegi @PjoterZ : jeśli jeszcze nie straciłeś zapału: możesz spróbować swojego kodu i powyższej modyfikacji? I jeszcze UWAGA: Jak już zostało wspomniane w kursie, zmiana kolejności tych linii musi być wykonana ręcznie, przed kompilacją. Włączenie CubeMX i dokonanie jakichkolwiek zmian spowoduje powrót tych linii do poprzednich stanów. Do każdego innego, kto mógłby sprawdzić w swoim IDE: jaki kod jest generowany? Czy to może jakieś moje ustawienia? Czy zamiana tych linii miejscami zmienia działanie programu? EDIT: Znalazłem forum producenta tego narzędzia. Problem był reportowany już w 2019 roku, niby został naprawiony, ale później nastąpił nawrót do błędnej wersji. Link tutaj i drugi link. Żeby ubić problem należy wykonać następujące czynności: Uruchom CubeMX Znajdź zakładkę 'Project Manager' (u góry) Idź do 'Advanced Settings' (po lewej) Znajdź obszar 'Generated Functions Calls' w dolnej części okna Zaznacz rząd w którym jest 'MX_DMA_Init' i po prawej u góry jest taki mały symbol ze strzałką do góry. Kliknij odpowiednią ilość razy, żeby 'MX_DMA_Init' wlazło wyżej, ponad 'MX_ADC1_Init', czy z czym tam się borykasz. Uśmiechnij się, łyknij piwa itepe, gdyż świat stał się ociupinę lepszy... P.S.: Gdyby ktoś miał ochotę popróbować tego wspomnianego przeze mnie tutoriala, to link jest tutaj: DigiKey Tak ulepszony program działa mi częściowo, tzn: wartości już się wyświetlają na bieżąco, są w oczekiwanym zakresie (max: 4095), ale kręcenie jednym potencjometrem zmienia wartość obu zmiennych wyświetlanych w oknie terminala. Kręcenie drugim potencjometrem nie powoduje widocznych zmian. Grzebię dalej... EDIT2: Wygrzebałem. W szale grzebania w ustawieniach przegapiłem, że w ustawieniach ADC1 Rank 1 ma mieć Channel1 a Rank 2 Channel 2. Tyle. Ustawione, zapisane, działa! -
Kurs STM32L4 – #9 – przetworniki analogowo-cyfrowe (ADC)
smilee odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
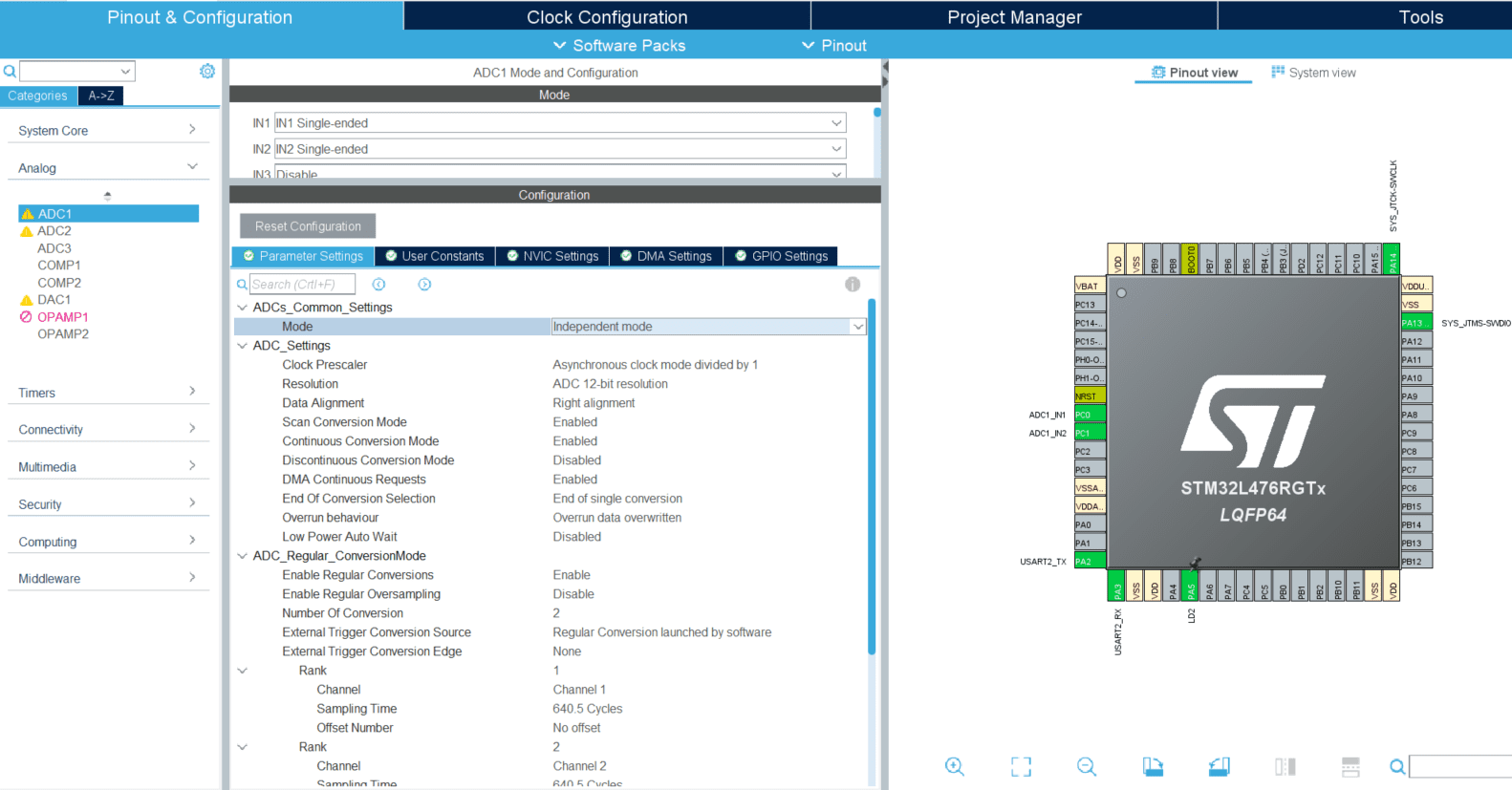
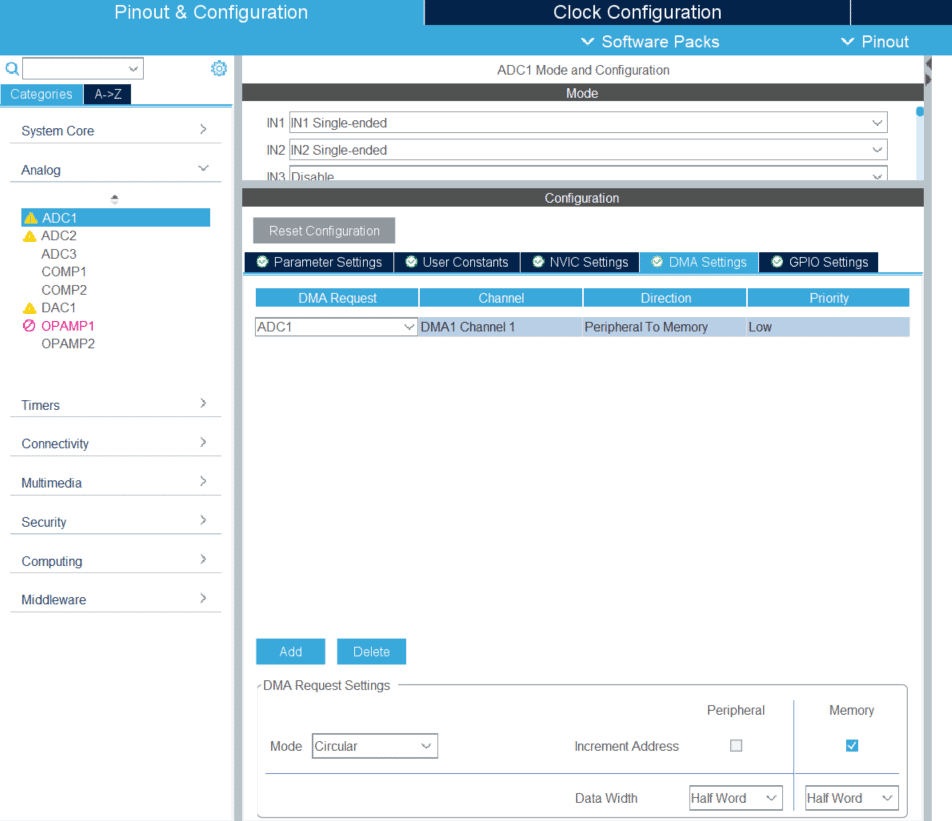
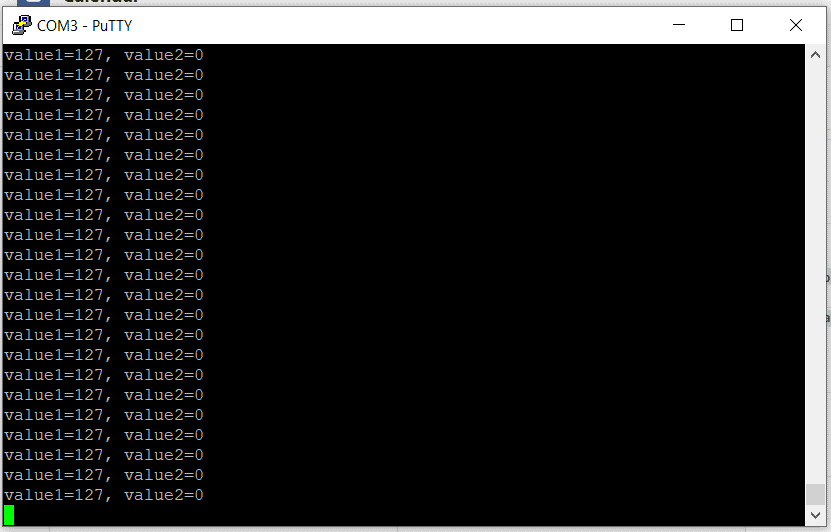
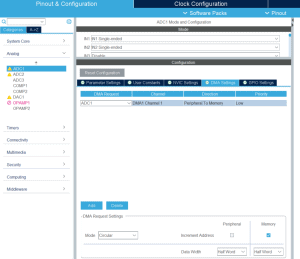
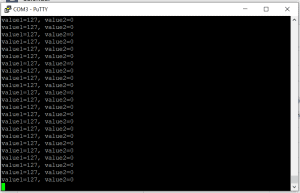
Podobnie jak u użytkownika @PjoterZ u mnie też DMA nie chce dobrze zadziałać. Używam Nucleo z STM32L476RG. Ekrany z CubeMX: Kod: /* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c in proj28-ADC-DMA * In CubeMX change settings of ADC1: * DMA Settings -> Add -> in DMA Request column set ADC1, go to bottom part * of the window and set paremeter 'DMA Request Settings' and * 'Mode' to 'Circular' * Also: ADC1 set 'Continuous Conversion Mode:' to 'Enabled' * and 'DMA Continuous Requests:' set to 'Enabled' * @brief : Main program body ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2021 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include <stdio.h> /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ ADC_HandleTypeDef hadc1; DMA_HandleTypeDef hdma_adc1; UART_HandleTypeDef huart2; /* USER CODE BEGIN PV */ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void MX_GPIO_Init(void); static void MX_ADC1_Init(void); static void MX_DMA_Init(void); static void MX_USART2_UART_Init(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ int __io_putchar(int ch) { if (ch == '\n') { __io_putchar('\r'); } HAL_UART_Transmit(&huart2, (uint8_t*)&ch, 1, HAL_MAX_DELAY); return 1; } /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_ADC1_Init(); MX_DMA_Init(); MX_USART2_UART_Init(); /* USER CODE BEGIN 2 */ /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ volatile static uint16_t value[2]; //half word type data buffer to store data // volatile, because we will modify its value outside of scope, // and static because we want the non-stack segment for it (this will have allocated memory in data segment) HAL_ADCEx_Calibration_Start(&hadc1, ADC_SINGLE_ENDED); HAL_ADC_Start_DMA(&hadc1, (uint32_t*)value, 2); //HAL_ADC_Start_DMA(&hadc1, (uint32_t*)value, 2); // DMA version of HAL_ADC_Start(), function wants pointer to uint32_t, so cast it. // above function accepts parameters (adc, buffer where data will be stored by DMA, how many items /variables/ to copy) while (1) { printf("value1=%u, value2=%u\n", value[0], value[1]); HAL_Delay(250); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Configure the main internal regulator output voltage */ if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK) { Error_Handler(); } /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_MSI; RCC_OscInitStruct.MSIState = RCC_MSI_ON; RCC_OscInitStruct.MSICalibrationValue = 0; RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_6; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_MSI; RCC_OscInitStruct.PLL.PLLM = 1; RCC_OscInitStruct.PLL.PLLN = 40; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV7; RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2; RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK) { Error_Handler(); } } /** * @brief ADC1 Initialization Function * @param None * @retval None */ static void MX_ADC1_Init(void) { /* USER CODE BEGIN ADC1_Init 0 */ /* USER CODE END ADC1_Init 0 */ ADC_MultiModeTypeDef multimode = {0}; ADC_ChannelConfTypeDef sConfig = {0}; /* USER CODE BEGIN ADC1_Init 1 */ /* USER CODE END ADC1_Init 1 */ /** Common config */ hadc1.Instance = ADC1; hadc1.Init.ClockPrescaler = ADC_CLOCK_ASYNC_DIV1; hadc1.Init.Resolution = ADC_RESOLUTION_12B; hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT; hadc1.Init.ScanConvMode = ADC_SCAN_ENABLE; hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV; hadc1.Init.LowPowerAutoWait = DISABLE; hadc1.Init.ContinuousConvMode = ENABLE; hadc1.Init.NbrOfConversion = 2; hadc1.Init.DiscontinuousConvMode = DISABLE; hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START; hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE; hadc1.Init.DMAContinuousRequests = ENABLE; hadc1.Init.Overrun = ADC_OVR_DATA_OVERWRITTEN; hadc1.Init.OversamplingMode = DISABLE; if (HAL_ADC_Init(&hadc1) != HAL_OK) { Error_Handler(); } /** Configure the ADC multi-mode */ multimode.Mode = ADC_MODE_INDEPENDENT; if (HAL_ADCEx_MultiModeConfigChannel(&hadc1, &multimode) != HAL_OK) { Error_Handler(); } /** Configure Regular Channel */ sConfig.Channel = ADC_CHANNEL_1; sConfig.Rank = ADC_REGULAR_RANK_1; sConfig.SamplingTime = ADC_SAMPLETIME_640CYCLES_5; sConfig.SingleDiff = ADC_SINGLE_ENDED; sConfig.OffsetNumber = ADC_OFFSET_NONE; sConfig.Offset = 0; if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK) { Error_Handler(); } /** Configure Regular Channel */ sConfig.Channel = ADC_CHANNEL_2; sConfig.Rank = ADC_REGULAR_RANK_2; if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN ADC1_Init 2 */ /* USER CODE END ADC1_Init 2 */ } /** * @brief USART2 Initialization Function * @param None * @retval None */ static void MX_USART2_UART_Init(void) { /* USER CODE BEGIN USART2_Init 0 */ /* USER CODE END USART2_Init 0 */ /* USER CODE BEGIN USART2_Init 1 */ /* USER CODE END USART2_Init 1 */ huart2.Instance = USART2; huart2.Init.BaudRate = 115200; huart2.Init.WordLength = UART_WORDLENGTH_8B; huart2.Init.StopBits = UART_STOPBITS_1; huart2.Init.Parity = UART_PARITY_NONE; huart2.Init.Mode = UART_MODE_TX_RX; huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart2.Init.OverSampling = UART_OVERSAMPLING_16; huart2.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE; huart2.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT; if (HAL_UART_Init(&huart2) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN USART2_Init 2 */ /* USER CODE END USART2_Init 2 */ } /** * Enable DMA controller clock */ static void MX_DMA_Init(void) { /* DMA controller clock enable */ __HAL_RCC_DMA1_CLK_ENABLE(); /* DMA interrupt init */ /* DMA1_Channel1_IRQn interrupt configuration */ HAL_NVIC_SetPriority(DMA1_Channel1_IRQn, 2, 0); HAL_NVIC_EnableIRQ(DMA1_Channel1_IRQn); } /** * @brief GPIO Initialization Function * @param None * @retval None */ static void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET); /*Configure GPIO pin : LD2_Pin */ GPIO_InitStruct.Pin = LD2_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(LD2_GPIO_Port, &GPIO_InitStruct); } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/ Terminal: Zauważyłem, że value1 zmienia się, jeśli zmienię ustawienie potencjometru i wcisnę 'Reset', tak jakby wartość była odświeżana tylko zaraz po starcie procesora. Ponadto przy ustawieniu na max (3,3V na wejściu ADC1_IN2, to jest PC1, potwierdzone miernikiem) wartość value1 wynosi 254 (przy poprzednich testach ADC, bez DMA, wartości odczytywane z ADC były rzędu 4095, czyli bardziej ok jak na 12-bitowy przetwornik). Wartość value2 bez zmian, zawsze 0. Czyżby DMA nie działało jak należy? (czas próbkowania usawiony na 640.5 cykla zegara)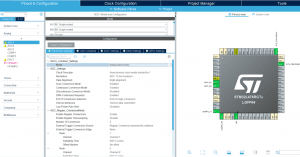
-
Kurs STM32L4 – #8 – liczniki sprzętowe (PWM, enkoder)
smilee odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
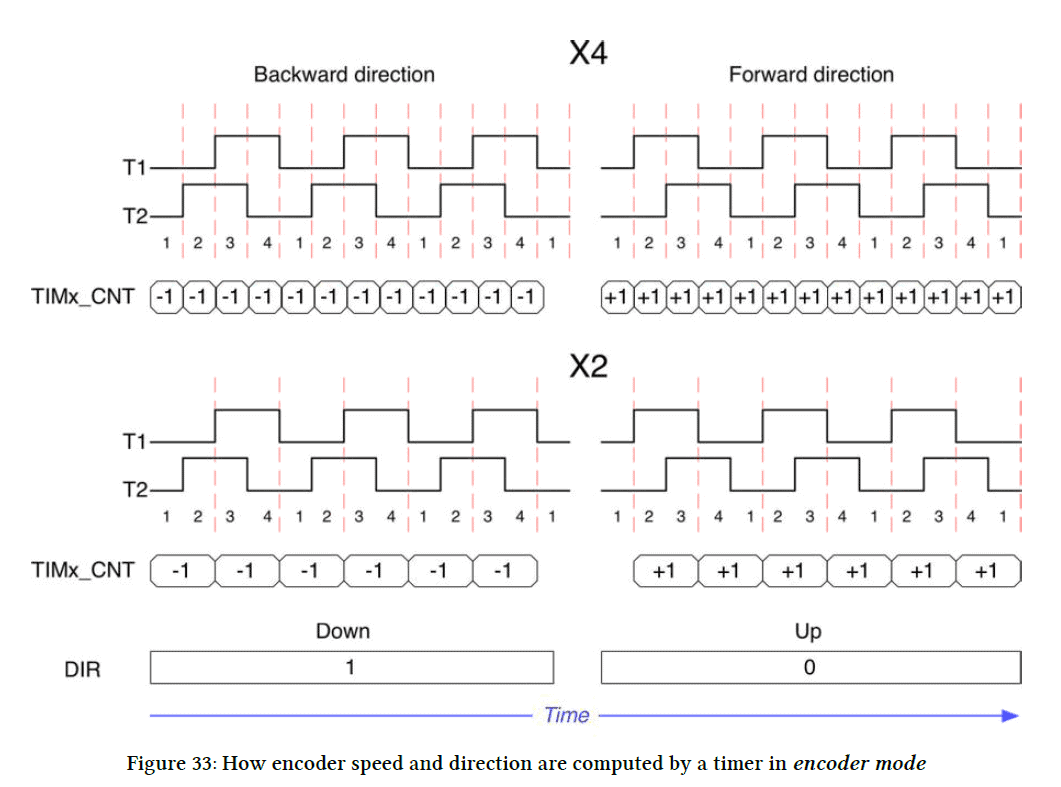
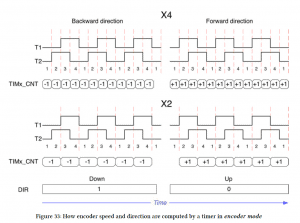
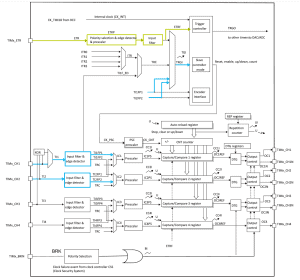
@Gieneq nie, nigdy. Ale cytowany listing nie miał w swoim zadaniu zliczać co 1, tylko pokazywać zmianę szerokości impulsu w zależności od prędkości kręcenia. I tutaj program spisuje się znakomicie. Kręcę szybko, impulsy następują po sobie szybko, zmienna wskazuje małe wartości 30 - 150, ekstremalnie wolno: 10000 - 40000. Po małym dochodzeniu mogę powiedzieć nieco więcej. Sprzętowo wyjścia enkodera mam podciągnięte to zasilania, więc 'w spoczynku' oba są w stanie wysokim. Kręcę w prawo (kierunek obrotu wskazówek zegara). Poniżej zdjęcie przebiegu generowanego przez enkoder (jeden softclick). A teraz grafika z książki pt.: "Mastering STM32" napisanej przez Carmine Noviello I to wyjaśnia zaistniałą sytuację. Mam odpowiednik trybu X2 przy ustawieniu w CubeMX: 'Encoder Mode' na 'Encoder Mode TI1'; na jeden softclick licznik zmienia wartość o 2. Żeby uleczyć moją bolączkę zmodyfikowałem linię kodu i zrobiłem tak: value = (__HAL_TIM_GET_COUNTER(&htim3) >> 1); Teraz już pięknie zwiększa/zmniejsza się o 1. Trzeba tylko pamiętać,że w tym przypadku wartość na pełen obrót musi być x2. (U mnie na jeden obrót jest 20 softklików, więc w CubeMX 'Counter Period' ustawiam na 40). Można też pójść dalej i w CubeMX ustawić 'Encoder Mode' na 'Encoder Mode TI1 and TI2' i wtedy mamy odpowiednik trybu X4, wtedy linię kodu zamieniamy na value = (__HAL_TIM_GET_COUNTER(&htim3) >> 2); a wartość na pełen obrót x4. Ale to jeszcze nie koniec (niestety). Walczę dalej. Spoglądając na schemat układu liczników w STM, znajdujemy tam takie coś: Mogę spróbować z preskalerem. W kodzie sprawdzamy warość CNT counter, na lewo mamy preskaler PSC. Więc szybko wróciłem do oryginalnej linii kodu, a w CubeMX zmieniłem ustawienia: 'Encoder Mode' na 'Encoder Mode TI1' i dodatkowo 'Counter Settings --> Prescaler' na 2. I trochę działa. To "trochę" to dlatego, że pierwsze dwa softkliki liczone są poprawnie, ale trzeci jest zgubiony. I tak cyklicznie. Powrót do ustawień w CubeMX i lecimy: 'Encoder Mode' na 'Encoder Mode TI1 and TI2' i dodatkowo 'Counter Settings --> Prescaler' na 4. Tym razem gubię klik 1 a potem 6, potem 11 itd. Niestety nie znalazłem jeszcze odpowiedzi na to, dlaczego tak się dzieje i wybieram opcję modyfikacji kodu z przesunięciem bitowym w prawo. To rozwiązuje mój problem. Tutaj zostawiłem wpis dla kogoś, kto natknął się na podobną zagwozdkę. Jeśli ktoś ma jakieś dodatkowe info, to chętnie usłyszę. Pewnie możnaby zaprząc do pracy pana Debugger-a, ale chciałem pójść dalej z kursem, więc na razie daję temu spokój.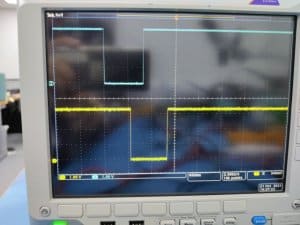
-
Kurs STM32L4 – #8 – liczniki sprzętowe (PWM, enkoder)
smilee odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Dzięki za masę pracy włożoną w ten kurs, jest super. Do rzeczy: Korzystam z kodu w śródtytule "Tryb obsługi enkoderów w STM32L4". Mam podłączony enkoder (spoza zestawu), przy zmianie pozycji (obracaniu) można wyczuć takie miękkie klikanie, każdy klik powoduje u mnie zwiększenie/zmniejszenie wartości zmiennej value = __HAL_TIM_GET_COUNTER(&htim3) o 2. Przy powolnym obracaniu 'pomiędzy klikami' mam upragnioną zmianę o 1, ale nie jest to optymalne. Czy w CubeMX gdzieś można wyklikać odpowiednie ustawienia? Wiem że można dopisać linijkę kodu i podzielić 'value' przez 2, ale chyba lepiej byłoby skorzystać ze sprzętowej obsługi. Przy zmienie ustawień w CubeMX znalazłem opcję 'Encoder Mode', przy zmianie na 'Encoder Mode TI1 and TI2' za każdym miękkim klikiem mam skok o 4, ale to nie o taką zmianę mi chodziło. -
Kurs STM32L4 – #3 – wejścia/wyjścia, czyli GPIO w praktyce
smilee odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Dziękuję za kurs. Nie wiem, czy to kwestia ustawień, ale w poniższej kolejności zdarzeń IDE usuwa mi zawartość pętli while(1) z main(). Wybranie, opisanie portów Wpisanie kodu źródłowego Zaprogramowanie Nucleo i radocha z działania OK, jednak potrzeba zmian, np. dodanie Pull-up do portu, więc działanie na Device Configuration Tool (zmiany będą w pliku .ioc), klik na Save Po powrocie do kodu źródłowego widzę, że pętla while(1) jest pusta Mogę się na to zgodzić dopóki mam tam kilka linii, ale co jeśli chciałbym, żeby IDE mi tego nie ruszało? Czy są jakieś ustawienia odpowiedzialne za to zachowanie? A może takich zmian dokonywać bezpośrednio w pliku? A jeśli tak, to w którym pliku zlokalizowane są inicjacje pull-up/pull-down itp? ---EDIT--- No tak, pull-up/pull-down jest w pliku main, wszystko jest poniżej we funkcji MX_GPIO_Init(), właśnie doczytałem. --EDIT2-- W zapędzie edycji kodu źródłowego mój kod w petli while(1) wylądował poza /* USER CODE END WHILE */ i dlatego IDE usuwało mi kod. Problem rozwiązany. -
Budżetowa drukarka 3D wydrukowana na samej sobie.
smilee odpisał w temacie użytkownika Kredek • Projekty - DIY
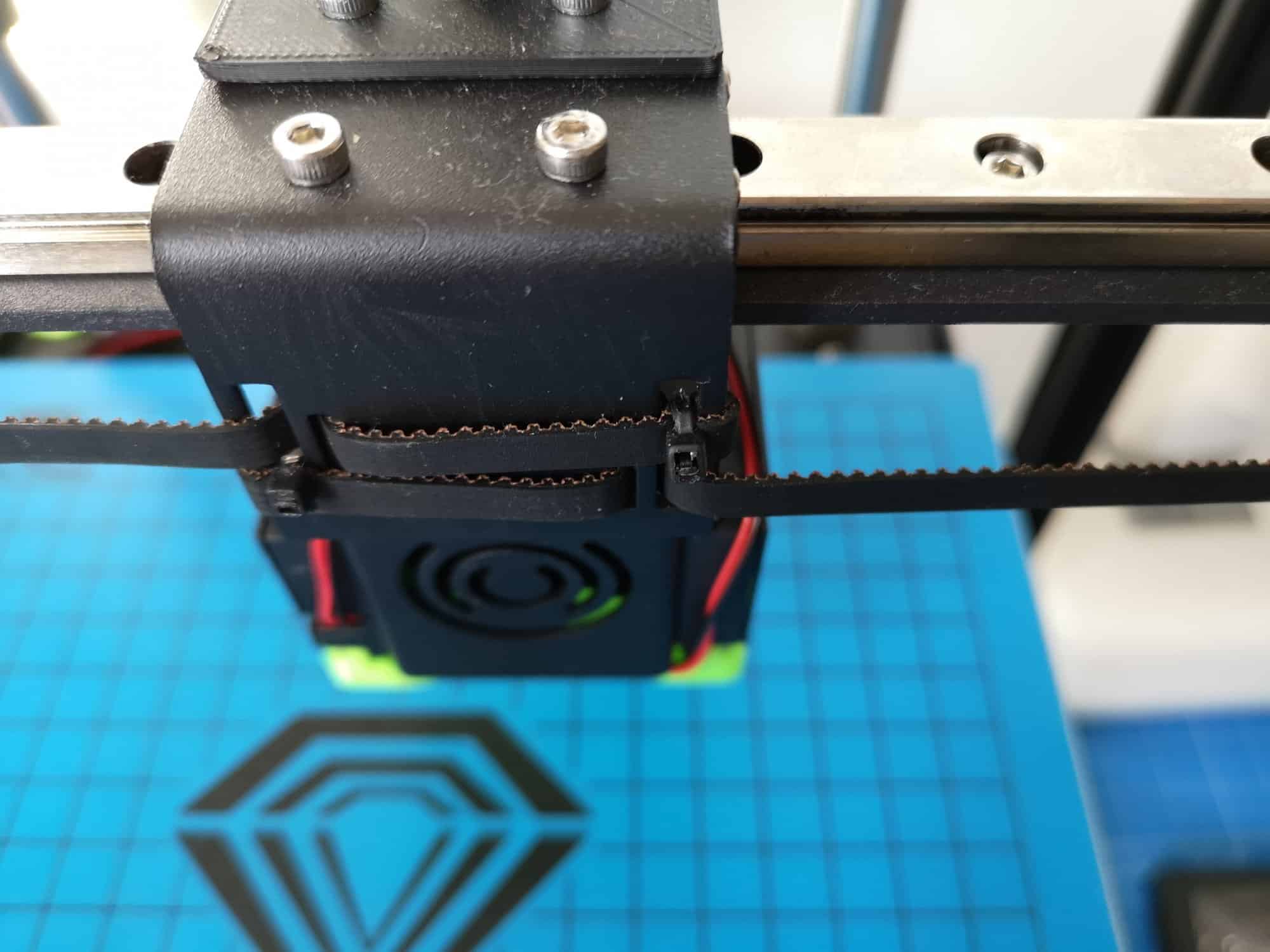
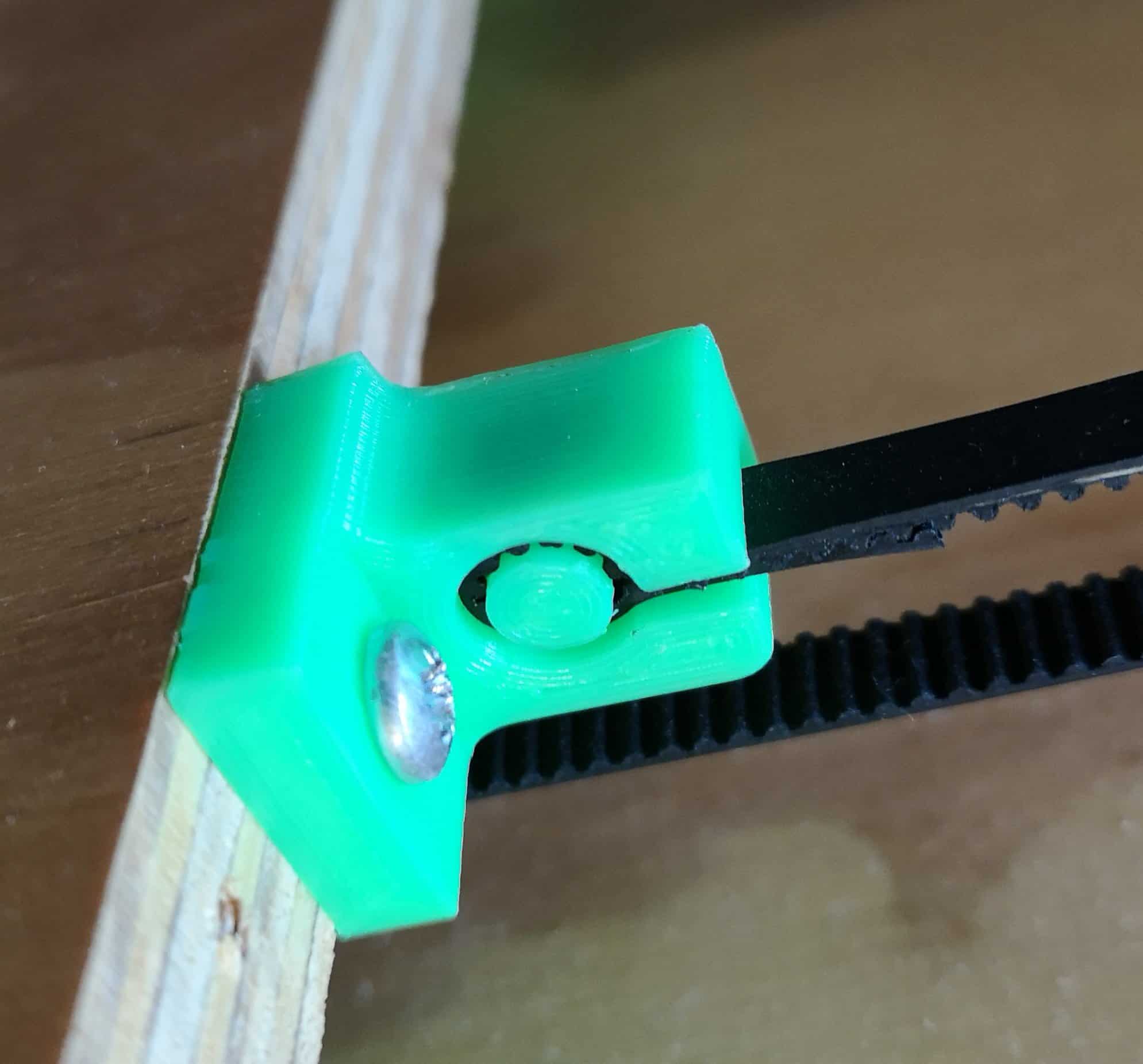
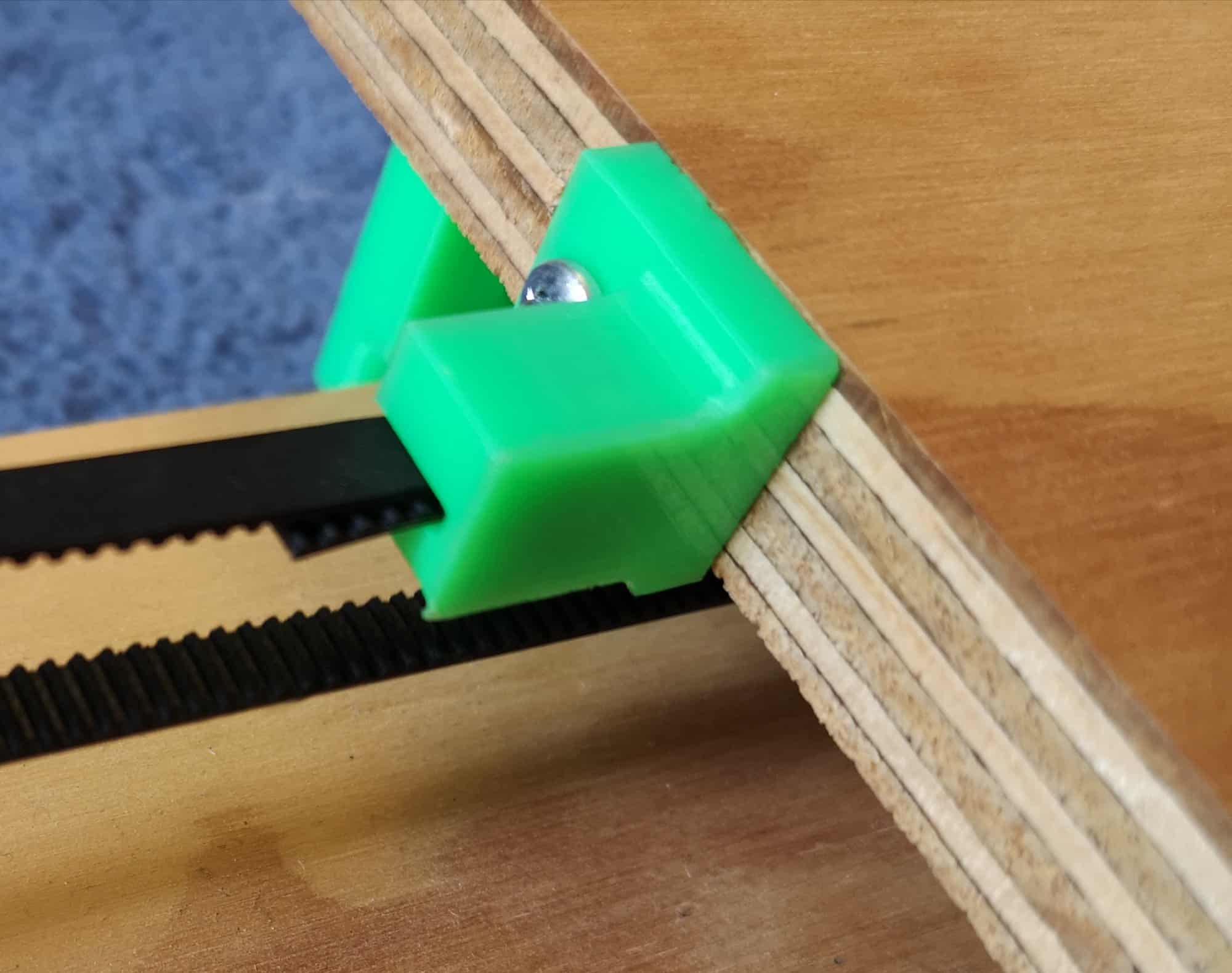
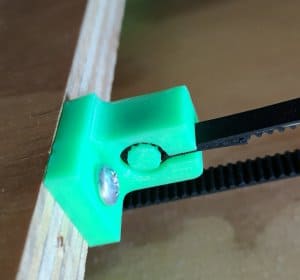
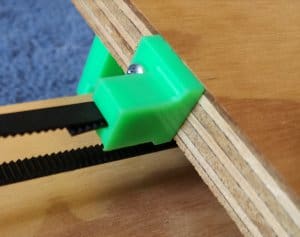
Hej, nic trudnego, a możliwości są nieskończone. Oto zamocowanie paska do karetki w Sapphire Pro; jak widać to są po prostu szczeliny przez które przechodzą paski, a potem są one złapane trytytkami. A tutaj moje własne wykonanie uchwytów na pasek GT2. To jest taki stół - platforma suwana, była część projektu używanego w pracy. Uchwyt front: Uchyt plecy: Nie mam pustego uchwytu żeby pokazać, ale zasada jest prosta: pętlę z paska wsuwa się w szczelinę uchwytu, on się nie wysunie bo zazębia się ze sobą. Myślę że znajdziesz jakieś uchwyty np na thingiverse.com, wpisz tam "timing belt holder" albo "GT2 holder" (GT3, zależy jaki masz pasek) ewentualnie mogę podesłać stl-a z tego co masz na zdjęciach.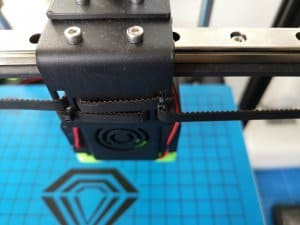

-
Budżetowa drukarka 3D wydrukowana na samej sobie.
smilee odpisał w temacie użytkownika Kredek • Projekty - DIY
Panie Kredek, jestem pod wrażeniem! Twój projekt udowadnia, że dla chcącego nic trudnego... Brawo. Najbardziej podoba mi się zdjęcie z połączeniem termoglutem i jego wydrukowanym zastępcą :) To musi być mocno motwujące kiedy za każdym wydrukiem jakość produkowanych części staje się widocznie lepsza. Co do gwintów w alu: da się i zazwyczaj nie ma problemów. Zrobiłem całą masę różnych gwintów w alu i rzadko mi się je udaje zepsuć (częściej już kiedy za mocno się przyłożę do dokręcania śrubek, a sam profil albo blacha alu jest cieniutka). Pamiętaj tylko o 3 sprawach: 1. Odpowiedniej wielkości otwór (w wyszukiwarce wpisz frazę 'otwory pod gwinty', znajdź tabelkę i tego się trzymaj) 2. Gwintowniki idą po 3 w zestawie. Wstępny, właściwy i końcowy. Najlepiej rozpoznać po nacięciach na gwintowniku, zaraz przy jego szczycie. Ten wstępny ma dużą część czubka jakby płaską, bez nacięć. To pozwala łagodnie i sprawnie zacząć gwintowanie. Po przegwintowaniu wstępniakiem lecisz głównym no i na końcu wygładzającym Ja czasem w alu od razu po wtępnym przechodzę do ostatniego. W przypadku ekstremalnym (1 gwintownik w zestawie) próbuj gwintować z dużą ilością smarowania (patrz punkt 3), a potem z wyczuciem (i smarowaniem) wkręcaj śrubkę. 3. Smarowanie! Jakaś oliwa/olej, coś łatwo płynącego. Dozuj regularnie i często podczas gwintowania. Dzięki temu gwint się nie zerwie podczas robienia. Jak już gwint 'złapie', to jakieś 0.5 obrotu, cofnij, dodaj smarowania, znowu 0.5 obrotu, poluzuj znowu itepe. Z czasem zdobędziesz wyczucie. Ja już gwinty w większości przypadków robię wkrętarką. Jak już zostało wspomniane, daruj sobie ESP. Trzymaj się malinki, Octoprint jest dobrym wyjściem. No i nie poddawaj się, dobrze Ci idzie! -
Kurs STM32 - #6 - Pomiar napięcia, przetwornik ADC
smilee odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Zadanie domowe 6.5. Podłączyłem dwa fotorezystory, wszystko działa ok, tylko zdarzenie kiedy oba kanały mają dokładnie taką samą wartość napięcia następują niezwykle rzadko (co jest zrozumiałe, przy takich pomiarach). Czy ktoś może podać sugestię, jak zrealizować porównanie "mniej-więcej"? Tzn, chciałbym zrobić warunek: if (ADC_kanal1 == ADC_kanal2) printf "prosto"; , z tym, że ADC_kanal1 może różnić się od ADC_kanal2 o jakąś założoną przeze mnie wartość, powiedzmy x.