ojebejbe
-
Zawartość
81 -
Rejestracja
-
Ostatnio
-
Wygrane dni
1
Osiągnięcia użytkownika ojebejbe
")





-
A próbowałeś z biblioteką ze strony http://www.voti.nl/rfm73/ ? Ja przez chwile próbowałem uruchomić ją na MC9S12XDT512, właśnie przyszło mi do głowy jedno miejsce, którego nie sprawdziłem, tak czy inaczej mam nadzieję, żę do poniedziałku mi zadziała. Może coś z tego tematu się przyda?
-
Robotic Arena 2013 - nowe spojrzenie na konkurencje
ojebejbe odpisał w temacie użytkownika ojebejbe • Ogłoszenia organizacyjne
Mi się ta konkurencja bardzo podoba, chociaż z drugiej strony... Nie wiem co obecne turbinowce na krótkie proste i same kąty proste. Istniejące roboty i tak 90% czasu spędzają poza linią, a na takim labiryncie ich dotychczasowe atuty są wadami. I szczerze mówiąc nie wydaje mi się, żeby robtot-na-labriynt-po-linii był prostszy od FTRa. Rozsądna wielkość planszy/toru/jakkolwiek powinna być chyba podobna do labiryntu MM. Mechanika, kąty proste które i tak sprawiają ogromną trudność na początku, mapowanie i próba rozwiązania labiryntu. Nie wiem, nie wiem. Ciągle brakuje czasu (e. i robotów 😃 ), żeby wykleić sobie fikuśną trasę z rozgałęzieniami i zobaczyć co z tego wychodzi. Może ktoś już po cichu zaczął domowe testy, żeby mieć szansę na przewagę podczas zawodów? 😃 BotlandTeam coś cicho ostatnio, krakowskich Odkurzaczy też nie widać.. kto wie 😃 Jazda po przekątnej i ścinanie zakrętów (no, może to drugie nie do końca) to przecież normalka w MM 🙂 W pierwszym poście pisałem o kilku ciekawych pomysłach, które zostały jednak (chwilowo?) porzucone. Na pewno pojawi się więcej na ten temat, ale przewijał się też temat MME, coś na zasadzie trochę ścianek, trochę kresek, gilotyna i wodospad. W każdym razie chwilę rozważaliśmy różne warianty ilości ścianek i linii tworzących labirynt, ale MM (chyba już od trzech lat to powtarzamy) ciągle się u nas rozwija i trochę raczkuje. Wydziwianie i kombinowanie mija się tu z celem. Co jest największą przeszkodą w MM? Zmierzam do tego, że zmienilibyśmy tylko czujniki odległości na czujniki linii, wyeliminowalibyśmy ścianki (z jednej strony nie ma o co zahaczyć, z drugiej łatwiej się zgubić i utrudniamy profilowanie prędkości - patrząc do przodu wiemy czy będzie ścianka i potrzeba hamowania. Znaczniki przed kątem prostym? Sieczka dla czujników. Ok, uskoku na łączeniu płyt by pewnie nie było (w tym roku mam nadzieję, że to ogarniemy), ale reszta zostaje taka sama. Mysiarze? Fajnie, że dotychczasowe opinie są konstruktywne i raczej pozytywnie nastawione do zmian. Szykują się inne, ciekawsze (oby fajniejsze), ale przede wszystkim inne zawody. Fajno 😃 -
Koło Naukowe Integra zaprasza na ROBOCOMP 2013
ojebejbe odpisał w temacie użytkownika Treker • Zawody/Konkursy/Wydarzenia
O, w końcu zapytam. Czym nagrywacie? //Edit: Trzecia walka ćwierćfinałowa. Ktoś jeszcze przeciwny stawianiu robotów zawsze tyłem, w przeciwnych ćwiartkach, zamiast "dowolne miejsce ringu, przegrany stawia po wygranym"? Co się stało w drugiej walce ćwierćfinałowej? -
Robotic Arena 2013 - nowe spojrzenie na konkurencje
ojebejbe odpisał w temacie użytkownika ojebejbe • Ogłoszenia organizacyjne
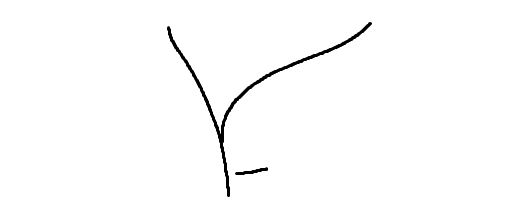
RF* 😉 Posłużę się takim wzorcowym i skrupulatnie przygotowanym przykładem, który był odpowiedzią na podobne pytanie. Włożone w niego było sporo pracy i energii, ale wciąż jest to rysunek tylko "poglądowy" samego rozjazdu ze znacznikiem - mam jednak nadzieję, że wystarczająco rozjaśni sytuację. Słowo komentarza, którego brakło na rysnku - skala została zachowana, linia znacznika jest faktycznie prostopadła i prosta (przy zapisie ją wygło). Na przykładzie robot powinien wybrać prawą* ścieżkę. *Prawą w kontekście prawej strony, nie postępowania. Start/meta mogłyby być oznaczane w podobny sposób jak znacznik, tylko po obu stronach trasy jednocześnie - np. w przypadku "ślepych uliczek".
-
Z drugiej strony... bez jaj. Żeby nie zdać podstawy z matmy, od kiedy jest obowiązkowa, to trzeba albo mieć bardzo zły dzień (ale to tak zły, że sobie nie mogę wyobrazić), albo być kretynem. Z polskim i językiem obcym to samo. Czytanie ze zrozumieniem, absolutne podstawy języka, których można nauczyć się słysząc końcówki zdań prrzebijające się spod polskiego lektora w telewizji. Poza tym jeszcze jedno. KAŻDY maturzysta w teorii powinien mieć co najmniej 50% na dowolnym egzaminie maturalnym (poziom podstawowy). Pomijając zakres materiału, który jest dla jednego przedmiotu porównywalny z pierwszym kołem z analizy, po 2 miesiącach na studiach, ale to przecież są rzeczy które przez te 3-4 lata były w szkole. Wiedzy na te 30% żeby zdać, a na 50% przynajmniej, każdy powinien mieć.
-
Ciekawe filmy (elektronika, mechanika, robotyka)
ojebejbe odpisał w temacie użytkownika Treker • Wiadomości
-
Robotic Arena 2013 - nowe spojrzenie na konkurencje
ojebejbe odpisał w temacie użytkownika ojebejbe • Ogłoszenia organizacyjne
Dla obrony minisumo enhanced: albo Walki Pussy Magneta i Spidera2 (poza tą, w której się nie widzą) na małym ringu skończyłyby się w ciągu dwóch sekund, bo robot "na dole" by po prostu wypadł. //Edit: Przypomniało mi się. Co sądzicie o zasadzie, że przegrywa ten, który dotknie podłoża poza ringiem? W Wiedniu Ela i Baton przegrali bodaj ćwierćfinał, wynosząc przeciwnika na pługu, który (pług ofc) otworzył się za krawędzią i dotknął stołu. Podobnie z walkami w których jeden robot wyrzuca drugiego z taką siłą, że tamten wygrywa walkę, bo jeszcze jest w powietrzu, kiedy tamten wypada. Może zmiana na jakąś rozsądniejszą (mądrze zapisaną, coś w stylu połowy obrysu robota poza objętością nieskońćzenie wysokiego walca, którego przekrojem jest ring) blabla. Jaka jest Wasza opinia za albo przeciw zapisom w ich obecnym kształcie? -
Robotic Arena 2013 - nowe spojrzenie na konkurencje
ojebejbe odpisał w temacie użytkownika ojebejbe • Ogłoszenia organizacyjne
Przed poprzednimi zawodami kilka razy rozmawialiśmy z BotlandTeamem na temat LFów i LFa z przeszkodami. Efekt zmian w kategorii bez przeszkód, było widać na zawodach w postaci braku fragmentów "90 stopni - prosta - 90 stopni" albo jednej z tras eliminacyjnych. Po prostu nie było dalszych, mniej rewolucyjnych, pomysłów. W przeszkodach (może inni się zainspirują) jedyne sensowne propozycje to odcinek w negatywie (biała linia, czarne tło - wbrew pozorom nie takie hop siup z izolką), odcinek gdzie robot miał jechać tyłem i fragment w którym miał się zatrzymać, zatańczyć salsę i jechać dalej. Nie pamiętam gdzie i z kim, rozmawialiśmy o wymianie cegły na blok stali. Tak czy inaczej wszystkie przeszkody będą omijane na pałę 😉 RF wydał się chyba najciekawszy. Liczba przejazdów jest ograniczona, bo sędziowie skarżyli się na ból głowy i hałas 😉 Przyznaj sam, mówi się o tym od dawna, a ciągle nie ma dobrych pomysłów co zrobić z LFem i LFem enhanced. Czekaj. Kto na samym początku twierdził, że co to w ogóle jest, że LF jeżdżący po kratce jest bez sensu i w ogóle lame. Sincerely, wal się 😃 (dla niekumatych: my przynajmniej układamy labirynt bez ukrytych symboli..) Jest jeszcze parę ciekawych pomysłów, które odpadły w trakcie dyskusji, ale może warto się nad nimi zastanowić i spróbować zrobić coś fajnego. Ot takie 25pi^2... na pewno podzielimy się w temacie z pomysłami na konkurencje, ale faktycznie. Limit słów na dzisiaj mi się wyczerpał... 23:49.. 11 minut ;D -
Robotic Arena 2013 - nowe spojrzenie na konkurencje
ojebejbe odpisał w temacie użytkownika ojebejbe • Ogłoszenia organizacyjne
wszystkie próby nazwania konkurencji takich, które znamy do tej pory i po zmianach które proponujemy brzmią nieswojo. "stare"/"nowe", "klasyczne"/"rozszerzone", "dotychczasowe"/"eeeee...". Chyba najlepiej wypadają konkurencje "Starej Ery Robotów" i "Po Ewolucji Na Inny Szczebel" - skracane tak jak B.C. np. "Minisumo S.E.R" albo "Nanosumo ... wracając do tematu. @kling: Pierwsze pytanie i strzał w dziesiątkę. Pierwsze rozmowy na temat zmian odbyły się w styczniu i nie skończyły się na jednym spotkaniu. Z decyzją o odpuszczeniu LFa parę osób do tej pory się nie pogodziło. Powody są różne. Od zupełnie prozaicznych, takich jak chociażby ograniczona przestrzeń. Zawody w tym roku odbędą się najprawdopodobniej w innym miejscu (właściwie budynku, wciąż zostajemy na PWr), ale i tam, i w C-13 już bywało ciasno. Zakładając, że RFa wykleimy na czterech płytach już zabieramy (teoretycznie tyle samo, ale efektywnie więcej) co LFy do tej pory - znowu używamy czterech płyt, ale w mniej mobilnej konfiguracji, bo stanowiących całość. Do tego spodziewamy się, z dokładnością do rzędu, podobnej liczby robotów minisumo - już nie będzie jednego dużego ringu. Będą cztery. Microsumo nie do końca uda się rozegrać z boku, stawiając mały ring na dużym po tym jak skończyło się sumo. Sumo nie będzie, microsumo jest ostatnio popularne. Sobal ma trochę racji z tą elitarnością, ale my tego nie powiedzieliśmy 😉 Tak naprawdę chodzi o poniesienie ogólnego poziomu od samego początku + zmniejszenie przepaści w LFie, a w ogólności próba zrobienia LFa mniej nudnym. Roboty albo zap*&(*&*^%, albo wzbudzały się na prostej i wypadły 😉 (Dygresja: nie jesteśmy jedynym organizatorem zawodów, który ma pomysły na zmiany. nasze pomysły okazały się najłatwiej realizowalne, pozwalaja wystartować dotychczasowym konstrukcjom, a nowe reguły pozwalają na budowę nowego robota mając taki sam budżet). W teorii, jeśli każdy rozjazd będzie taki sam (kąt, odległość wyprzedzającego znacznika), to przy wykryciu "kąta prostego" można robić łuk na sztywno, można zostawić jak jest, robot się gibnie w bok na znaczniku i moooooże złapie dalej trasę. Tak naprawdę, to cytując @batona "zwykły LF też może startować w RFie, tylko musi mieć więcej niż 25 linii kodu. z 35 co najmniej", co zresztą zauważył też @sobal44. Jak się ogarniemy z zawodami w Poznaniu i zaliczaniem semestru w trzy dni, to się pobawimy naszymi LFami i zobaczymy jak to działa dla różnych konfiguracji trasy. Konstrukcja LFa jest na tyle prosta, że osoba która jest w stanie przejechać płynnie "starą" trasę pomyśli i wymyśli jak poradzić sobie na dosć "topornie" utrudnionej trasie. Roboty jadące wolniej, ale dokładniej mogą szukać przewagi w tym, że wjeżdżają na znaczniki/rozjazdy z czujnikami prostopadle do lnii. Wszystkie Impacty, Thunderstormy, Feniksy i inne Lizardy więej czasu spędzały poza trasą niż na niej, w slowmo to widać. Moim zdaniem budowa LFa na 3, 5, 7, 9, miliardzie (może miliardzie to nie) czujników niczym się nie różni w założeniach. Proponowane utrudnienia w trasie nie wymagają wielkiego przeskoku jakościowego w algorytmie. Z pomocą Forbotów, ktoś kto zbudowałby jednoliniowego LFa, zbuduje RFa. Zmiany w RA miały zmniejszyć ilość pracy i konkurencji, a i tak skończymy z jedną, podobną do innych i małą, konkurencją, ale pracy sobie dołożyliśmy... sporo. ja nie narzekam, nie potrzebuję tyle snu co kiedyś, także spoko 🙂 Co do dwaminisumo - markery i system wizyjny z określonym standardem, rozprowadzany przez organizatorów, wydaje się świetnym i oczywistym rozwiązaniem. niestety ma dwie wady - jest lamerskie i jak strumień zgubi klatki to będzie na organizatorów. sposób rozpoznawania robotów pozostawiamy zawodnikom. kamera i jaskrawe kolory to jedno. Triliteracja, ultradźwięki, określanie położenia na robotach. Metod jest dużo, a chyba żadna nie jest dobrze opisana w kontekśice robota (2,0). Liczę, że zobaczymy jakieś nieszablonowe rozwiązania i przekonamy się co niekoniecznie działa. @kling Nie jesteśmy jedynymi zawodami w kraju. może w efekcie zamiast 70 LFów, z których 20 przejeżdża trasę, będzie 30, ale zrobionych przez ludzi, ktorzy się przyłożyli do nowej kategorii i 30 robotów przejedzie na podobnym poziomie? I tak jak mówiłem - kategorie tworzone są z myślą o istniejących konstrukcjach. Nie uważam, żeby różnica między LFem a RFem była tak duża jak się wydaje. Satysfakcja z pokonania systemu i ukończenia trasy będzie duuuuużo większa, tego jestem pewien. Tuż przed nami zawody w Łodzi, tam można potrenować na normalnych trasach przed przyjazdem do Wrocławia 😉 Z drugiej strony może sKaNeR (łatwo się pisze ich nazwę, lol) nas jakoś zaskoczy? @piotreks-89 Zacznę od środka. Nie wyobrażasz sobie, żeby ludzie nagle zaczęli sprawiać sobie ringi do sumo, a potem sugerujesz system w którym musieliby przygotować się na na ringu do sumo i minisumo jednocześnie. Nie wiem jak patrzy początkowy konstruktor, ale wiem jak patrzy widz przychodzący na zawody od trzech lat. Walki finałowe na RA trwały sumarycznie pewnie z 20sekund. Tak jak pisałem, przy obecnych prędkościach i złośliwej bestii jaką jest bezwładność, aż przykro patrzeć na Enovę, Pussy Magneta (chłopaki wygrali życie tą nazwą), czy Mirrora. Nie jest tak, że przygotowanie do MS polega na ocenieniu jak się rozpędzić, żeby wystarczyło na wypchnięcie/wyrzucenie przeciwnika, ale na tyle małą, żeby nie spaść przed nim. Wybacz, ale walki Enovy z Mushroom Killerem, czy Pussy Magnetem z zeszłorocznego Enhanced przywróciły mi sympatię do minisumo. Teraz, kiedy zawodnicy będą mieli czas na przygotowanie się do dużego ringu... nie wierzę, że z niecierpliwością czekam na walki minisumo na zawodach. Zorganizowanie jednocześnie minisumo classic i minisumo enhanced jest pomysłem, jakby to ująć, nienajlepszym. Organizacyjnie, czasowo i zdroworozsądkowo wg mnie nie ma to sensu. Classic jest tak specyficznie przygotowany nie bez powodu. Nie chcemy, żeby za 2-3 lata, kiedy wszystkie zawody przejdą na większe ringi, unikając naszych błędów, przelanej krwi, potu, łez i poległych w boj, zapomniano o tym od czego się zaczęło. Minisumo classic jest taką kategorią-ciekawostką, która może wnieść trochę smaczku w głównej rywalizacji. Jestem przekonany, że zawodnicy, którzy trafią do kategorii classic, pokażą zdrową rywalizację i stworzą fajną, wyjątkową część zawodów. Wprowadzamy takie zmiany oferując zawodnikom coś więcej niż presetiż. Dajemy im możliwość przyjechania do Wrocławia i (krótkiego, bo wiadomo - obowiązki) spotkania z nami. Niektórzy nawet potrafią zdobyć się na próbę wymiany kilku zdań. Nie oszukujmy się. Nie robimy zawodów po to, żeby mieć najwięcej robotów, najwięcej widzów, nagród, sponsorów, kasy, chwały dziwek i koksu (ostatnie trzy i tak mamy z definicji - PWr w końcu). Robimy zawody po to, żeby się dobrze bawić, spotkać z ludźmi, przy okazji skopać tyłki ich robotom naszymi robotami. Mi wydaje się, że były trzy opcje - nic nie zmienimy i RA będzie przeciętna, zmienimy co chcemy zmienić, ludzie nie dopiszą i będzie słabo albo spróbujemy coś zmienić, ludziom się spodoba i kiedy za 3 lata inne zawody będą w naszej obecnej sytuacji, my będziemy krok do przodu. Szczerze? Marzą mi się kameralne zawody na 10-20 robotów, gdzie nikt nie robi problemów o byle pierdołę. Zawody są po to, żeby się dobrze bawić, tak? W ilu miastach organizatorzy wyglądają jakby mieli ubaw nie z tej ziemii? Może trochę zbaczam z tematu, ale chyba oczywistym jest, że nikogo nie zmuszamy do przyjazdu i wolimy 5 robotów, a zawodnicy mają różne pomysły na debla, albo RFa i w strefie serwisowej rozkminiają co by tu poprawić, żeby pojechać lepiej, niż 50 robotów, gdzie ludzie wystawiają kikla konstrukcji, skuszeni sprzętem za miliard złotych. Pierdółka, często przytaczana - walka finałowa, dużo ludzi, walka bardzo istotna (inside joke w KoNaRze), jeden z zawodników pożycza drugiemu szmatkę do czyszczenia kół. Kobiety mdleją, mężczyźni płaczą, tęcza na sali - tylko we Wrocławiu. //edit: Wiedziałem, że w międzyczasie pojawi się miliard postów, które właściwie to samo przekazują 😃 nie cierpię was. -
Robotic Arena 2013 - nowe spojrzenie na konkurencje
ojebejbe opublikował temat w Ogłoszenia organizacyjne
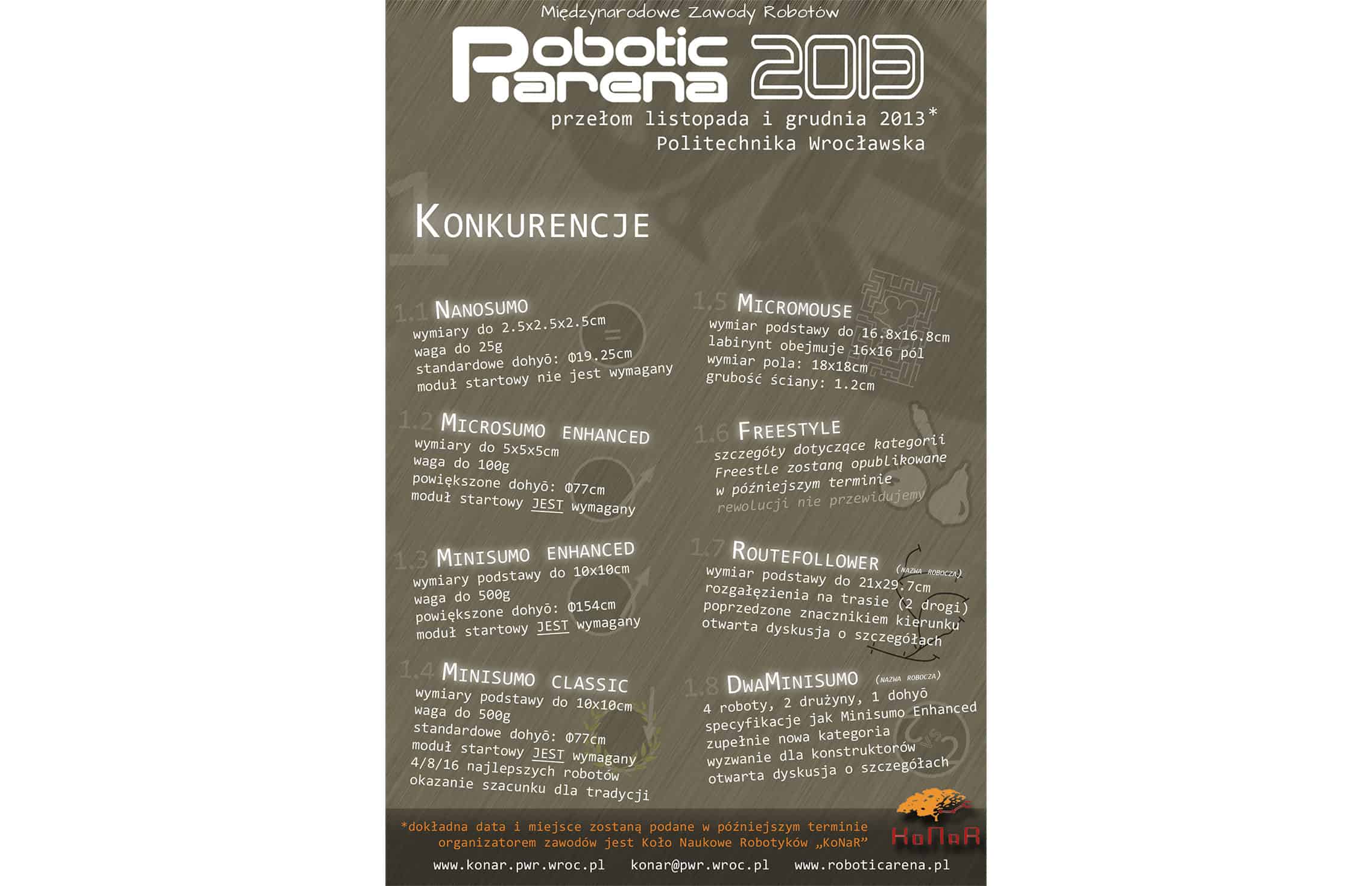
Szanowni, Szanowne, Drodzy, Drogie. Społeczności Forbotu, Nadszedł ten moment, w którym chcielibyśmy poważnie z Wami porozmawiać, ale wcześniej chciałbym Was serdecznie zaprosić do Wrocławia, na kolejną edycję zawodów Robotic Arena, które odbędą się w drugiej połowie listopada tego roku. Dokładna data zostanie podana w niedalekiej przyszłości. Miejsce w którym zostaną rozegrane tegoroczne zawody będzie znane w późniejszym terminie. Niektórych pewnie zmartwię informacją, że wspomniane przeze mnie zmiany nie dotyczą głównego organizatora imprezy, którego chyba nie trzeba przedstawiać? 😉 Na wszelki wypadek, w imieniu młodych, pięknych i niewyspanych z Koła Naukowego Robotyków "KoNaR", działająceg przy wydziale Elektroniki Politechniki Wrocławskiej, kłaniam się. W razie pytań, uwag i sugestii, pozostajemy do dyspozycji. Zawody zrobimy, podobnie jak co roku, najlepiej jak potrafimy. Mamy nadzieję, że przyjedziecie i będziecie (będziemy) się dobrze bawić, czy to jako zawodnicy, czy to jako widzowie. O wszystkich szczegółach, które będą się pojawiały w tzw. międzyczasie, będziemy na bieżąco informować w trzech miejscach: stronie internetowej zawodów (www.roboticarena.pl), fejsbukowym fanpejdżu (https://www.facebook.com/roboticarena) oraz naturalnie tutaj, na Forbocie. Pewnie część z Was słyszała anegdotę, że KoNaR zaczyna organizować kolejną edycję RA jeszcze w trakcie trwania bieżąej edycji. Szczerze mówiąc, to dni w których nie słyszałem słów "Robotic Arena" mógłbym policzyć na palcach jednej ręki. Wszystkie propozycje zostały przedyskutowane po kilkanaście razy i ustalił się ogólny kierunek, który zamierzamy zaproponować. Nie chcemy narzucać sztywno wszystkich reguł gry, dlatego szczegóły i kształt RA 2013 będziemy ustalali w ciagu najbliższych 6 miesięcy, często pytając o opinię grupy ludzi, bez których zawody miałyby troszkę inny sens. Oczywiście chodzi o zawodników, no ale nie ma co słodzić i się podlizywać 😉 Co jakiś czas będziemy podrzucali trochę materiałów opisujących kierunek zmian, które wydały nam się terazw tej chwili najciekawsze (przygoda!). Nie wiem jak będzie w kolejnych tematach, ale w tym pominąłem część argumentów, kontrargumentów i przemyśleń, które pojawiają się od jakiegoś czasu pomiędzy zawodnikami. Jeśli ktoś jest w miarę na bieżąco z Forbotem, to nie powinien mieć problemu z niektórymi skrótami myślowymi. Oczywiście, tak czy inaczej wyszła mi ściana tekstu. Grafika, która jest załączona na samym dole, jest trochę jak plan prezentacji - bez znajomości całej treści na niewiele się przyda. Kończąc przydługi wstęp, trochę konkretów o konkurencjach, w których będzie można wystartować. Postaramy się odpowiedzieć na wszystkie uzasadnione i konstruktywne komentarze i propozycje. [*]Nanosumo Ograniczenia nakładane na roboty tej klasy pozostają niezmienione idotyczą objętości oraz wagi robota. Konstrukcja powinna mieścić się w sześcianie o boku 25mm oraz ważyć nie więcej niż 25g. Walki odbywają się na standardowym dla tej kategorii dohyō (średnica 19.25cm, etc.). Roboty nie muszą posiadać modułu zdalnego startu. Pomimo braku katgorii piko i femto, zachęcamy do zabrania ich ze sobą [*]Microsumo enhanced Po przeczytaniu poprzedniego akapitu raczej oczywiste jest... Na wszelki wypadek, gdyby nie było. Ograniczenia w konstrukcji robota pozostają standardowe, tj. robot nie większy niż sześcian o boku 5cm , waga nie przekraczająca 100g. Zmienia się oczywiście dohyō - roboty przeniosą się na ring właściwy dla kategorii minisumo (śr. 77cm, etc.) Robot musi być wyposażony w moduł zdalnego startu. [*]Minisumo enhanced Niektórzy poznali tę kategorię podczas zeszłorocznej edycji Zawodów. Roboty minisumo (podstawa robota nie większa niż kwadrat o boku 10cm, waga do 500g) przenoszą się na dohyō właściwe dla kategorii sumo (śr. 144cm, etc.) Robot oczywiście musi być wyposażony w moduł zdalnego startu. [*]Minisumo classic Kolejna kategoria eksperyment. Jest ona ukłonem w stronę Kategorii Matki, kategorii od której Wszystko się zaczęło, kategorii której nie należy zapominać. Zdania o całkowitym usunięciu z Robotic Areny minisumo, takiego jakie znamy od zawsze, były mocno podzielone. Szalę pzeważyło, z czego się cieszę, jedno krótkie porównanie - to tak jakby z Igrzysk Olimpijskich wywalić zapasy albo lekkoatletykę. Turniej w stylu klasycznym zostanie rozegrany po zakończeniu kategorii enhanced, a prawo udziału będzie przysługiwało 8miu najlepszym robotom (wszystkim ćwierćfinalistom). Szczegółowy sposób przeprowadzenia walk (każdy z każdym do jednej wygranej, system pucharowy 1-8, 2-7, etc., system pucharowy z losowaniem) nie jest jeszcze dokładnie ustalony, podobnie jak procedura startu. Oczywiście jesteśmy otwarci na sugestie. [*]Micromouse W porównaniu z zeszłym rokiem raczej nic się nie zmienia, może oprócz sposobu mocowania płyt w labiryncie. Złożenie go tak, żeby na łączeniu płyt nie było uskoków, nie jest takie łatwe. Przebieg i widowiskowość tej konkurencji zależą w dużej mierze od startujących robotów.. [*]Freestyle Nie planujemy wielkich rewolucji i kategoria freestyle powinna wyglądać (w ogólności) tak samo jak wszędzie. Na chwilę obecną odkładamy dyskusję nad przebiegiem tej kategorii do momentu, w którym będziemy pewni lokalizacji tegorocznych Zawodów. Zastanowić się trzeba co ze zgłaszanymi na zawody kopterami. Z całym szacunkiem, ale to jazda na fali popularności. Nie do końca widzę sens startowania w ponad 90% gotowym robotem. Niedługo ktoś do Fresstyle zgłosi swojego MyKeepona (niecałe 30 GPB). Trochę sytuacja wymyka sie spod kontroli. [*]Routefollower(?) W kilku słowach - trasa ma oznaczony start i metę; jest otwarta; występują rozjazdy na których robot wybiera jedną z dwóch możliwości; “dobry kierunek” jest oznaczony przed rozjazdem, a znacznik jest prostopadły do trasy; “zły kierunek” - ślepa uliczka/długi i skomplikowany przejazd, powracający jednak na trasę; formuła podobna do micromouse - udostępniany jest fragment trasy zawierający wszystkie kluczowe “cosie”, tj. start, rozjazd ze znacznikiem, ew. ślepą uliczkę, metę., zawodnicy mają ograniczony czas/liczbę prób na trasie, następnie roboty odkładane są na stolik sędziego, odsłaniana jest główna trasa (jak się uda, to wyklejona nie na dwóch płytach hdf, a na czterech), komunikacja i ingerowanie w program robota jest zabronione po odsłonięciu trasy idea prostopadłego znacznika ma na celu “jakotakie” ułatwienie startu robotom z mniejszą ilością czujników, etc. - teoretycznie wykrycie kąta prostego można oprogramować jako jazdę po łuku z nadzieją “trafienia” w odnogę trasy (kwestia stałego/maksymalnego/inne ograniczenia kąta pod jakim nastąpi rozgałęzienia, może odległości znacznika od rozwidlenia w zależności od kąta pod jakim rozchodzi się trasa) Mamy wrażenie, że w kategorii linefollower niewiele zmieniło się w ciągu ostatnich 2 lat i w obecnej formie raczej się nie zmieni, stąd propoowane zmiany. [*]DwaMinisumo Na dohyō właściwym dla kategorii sumo walczą dwie drużyny, każda składająca się z dwóch robotów minisumo. Wygrywa ta drużyna, której robot ostatni pozostanie na ringu. W trakcie walki dopuszczona jest komunikacja z zewnętrznym systemem odpowiedzialnym za co tylko chcemy (obliczanie pozycij robotów, komunikacja z robotami, realizacja algorytmu sterowania, sterowanie ekspresem do kawy). Jesteśmy ciekawi jakie rozwiązania wymyślą chętni do wystartowania w tej kategorii, dlatego nie wymyślamy żadnych sztucznych ograniczeń co do budowy drużyny (poza tym, że roboty mają mieścić się w ograniczeniach klasy minisumo). Odpowiedzialnóść za transport, montaż i utrzymanie systemu zewnętrznego spoczywa w pełni na zawodniku. Jeśli okaże się, że jeden system przeszkadza drugiemu (zakłócenia, elementy konstrukcyjne uniemożliwiające pełne rozstawienie obu jednostek), to liczymy na to, że zawodnicy jakoś się dogadają. Konkurencja jest absolutną wersją alfa, sami nie wiemy czego się po niej spodziewać i jesteśmy ciekawi co z tego wyjdzie. W KoNaRze rozpoczęły się prace nad co najmniej dwiema drużynami, ale liczymy na to, że ktoś jeszcze podejmie wyzwanie. Będziemy bardzo wdzięczni za wszystkie sugestie i pomysły związane z DwaMinisumo. Chcemy, żeby na ostateczne szczegóły i finalny kształt regulaminu tej konkurencji, największy wpływ mieli zawodnicy którzy zbudowali/są w zaawansowanej fazie budowy swojej drużyny na kilka tygodni przed zawodami. Uprzedzając - jasne, że teoretycznie można wystawić dwa roboty nie mające pojęcia o tym, że walczą w drużynie, a właściwie zachowują się jak w deathmatchu. No niby mają szanse wygrać, nie? Tylko ten. No. Nie. Nie róbmy tak. Po prostu. Nie. Dzięki. Nie przedłużając za bardzo, dziękujemy tym którzy przebrnęli i przemyśleli. Czekamy na Wasze komentarze, a w w przypadku pytań, postaramy się wyjaśnić wszystkie wątpliwości.
-
Femtosumo Felek - pierwszy robot klasy Femtosumo
ojebejbe odpisał w temacie użytkownika NanoBot • Projekty - DIY roboty
Ta... Einstein powiedział też, coś o tym, żeby nie ufać 90% cytatów znalezionych w internecie 😉 Z tym zegarkiem w napędzie robota, to chodziło tylko o wykorzystanie samych zębatek, czy sprężyny, balansu i reszty mechanizmu? -
Wzory się zapomina, metody się zapomina, sposobu myślenia chyba nie. Jako studenci uczelni technicznych, powinniśmy mieć ogólne pojęcie o każdym temacie. Tak naprawdę humanistów (w dosłownym tego słowa znaczeniu) powinny kształtować uczelnie techniczne. Założę się, że wiele z osób na tym forum spędzało/spędza spore ilości czasu na klikaniu w linki powiązane na Wikipedii? Bo jest tyle ciekawych rzeczy na tym świecie. Wbrew pozorom, system edukacji (a uczelnie wyższe chyba w szczególności) uczą nas kombinowania. Studia kończą nie najmądrzejsi, ale nawytrwalsi. Ludzie inteligentni (z jednej i drugiej grupy) studia kończą lub nie kończą, ale coś z nich wynoszą. Umiejętność szybkiego uczenia się i odnajdywania się w przeróżnych sytuacjach to mocna cecha Polaków, której nie potrafimy odpowiednio sprzedać. Działalność w kołach naukowych jest wg mnie wyjątkowo cenna. Z różnych względów - zdobywania wiedzy, kontaktów, doświadczenia, obycia z różnymi ludźmi. Przykład budowlańców, którzy byli chętnie zatrudniani za granicą, bo położą kafelki, elektrykę, pomalują ściany, naprawią samochód, a w międzyczasie będą pędzili bimber. Z innymi zawodami jest chyba podobnie. Studiujemy AiR (uogólnienie, ale nie jest istotne co dokładnie). W sumie kończąc studia nie mamy przygotwania do pracy, wszystkiego musimy się uczyć od nowa. I dobrze. Jak trzeba będzie coś w pracy zrobić albo nauczyć, to się to zrobi i spokój. Trzeba tylko zacząć się szanować i cenić swoje umiejętności. Wychodząc z założenia, że nie mamy to na pewno nic się nie zmieni. Od dawna widzę takie dyskusje jak ta, od dawna zdroworozsądkowe podejście ludzi z mojego otoczenia mnie zaskakuje, a jednak wydaje się być coraz gorzej. Albo się starzeję, albo ktoś coś ściemnia. "Chcesz zmieniać świat, zacznij od siebie". Co jeszcze wkurza. Łatwość oceniania innych, presja ze strony otoczenia (studia skończyć trzeba, no jak to), wszystkie "nie wypada", "tak nie można", "jak to tak". Ile osób jest faktycznie sobą, ile żyje dla siebie, a nie dla innych? Jeśli ktoś nie oglądał, to polecam Fight Club. Tyle w tym temacie.
-
Chleb z dżemem - masło pomiędzy jednym i drugim, czy bez niego?
-
Ha. Dobry wybór 😉 W takim razie do zobaczenia w piekl... na wydziale 🙂
-
Z ciekawości - do czego potrzebujesz takich informacji?