Marekk
-
Zawartość
103 -
Rejestracja
-
Ostatnio
-
Wygrane dni
2
Osiągnięcia użytkownika Marekk
")





-
Miałem podobny problem, tzn. uszkodzony układ LM324. SMD. w ładowarce akumulatorów. Zamieniłem go na jakiś LM 324 pochodzący z wylutów. Zadziałało OK. Wcześniej nigdy nie zastanawiałem się nad literkami na końcu. Pobieżna lektura datasheeta wskazuje zależność tych liter od: temperatury pracy, obudowy, odporności na elektrostatykę, opakowania zbiorczego. Dlatego dałbym taki, jaki trafiłby się pod ręką (pasujący obudową), na 98% zadziała OK.
-

Sygnał z głośnika załaczjący Tranzystor lub mosfet w obwodzie?
Marekk odpisał w temacie użytkownika majster1983 • Zupełnie zieloni
Tranzystor przełączy się przy nawet niższym napięciu, jeśli dobrze dobrać wstępną polaryzację (bias). Do Twojego projektu zastosowałbym wyłącznik akustyczny (klaskacz). W nim zamiast mikrofonu podłączyłbym wyjście urządzenia z głośnikiem - uwaga - przez potencjometr (np. 1 kiloom) do regulacji czułości klaskacza. -
Czesc. Nie tak prosto wybrac silnik (jego moment obrotowy) majac mało danych. W tym wypadku obliczałbym z drugiej zasady dynamiki dla ruchu obrotowego. Moment siły działający na ciało obracające się równy jest iloczynowi momentu bezwładności względem aktualnej osi obrotu i przyspieszenia kątowego bryły. Moment bezwładności zależy od masy (podana) i jej rozmieszczenia względem osi. Trudno zmienialne parametry. Natomiast przyspieszenie wybierasz sam. Jesli platforma musi osiagnac zadana predkosc (lub zatrzymac sie), slknik musi dysponowac o wiele wiekszym momentem obrotowym niz w przypadku, jesli damy platformie wiecej czasu na rozpedzenie. Do tego dodsc nslezy opory ruchu, tarcie.
-
Witam, Po pierwsze zamontowałbym jak najwyżej (wieżowiec, maszt >10 m). Dałbym "Yagi" (im więcej elementów tym lepiej) . Zamiast jednej - zespół 4 jednakowych anten. Wzmacniacze: odbiorczy i nadawczy dałbym przy antenach. We wzmacniaczu odbiorczym równolegle 4 niskoszumne tranzystory. Wiem, nieco skomplikowane,ale 73!.
-
Nie. Mikrofon to nie termistor.
-
Cześć Aby prawidłowo odebrać stację, obwód LC musi być nastrojony na odpowiednią częstotliwość, jeśli jest ona zbyt wysoka lub za niska, usłyszymy szum. Przestrajać obwód LC (ten między punktami AB) można np. zmiennym kondensatorem, lub dodawać pojemność równolegle. Między palcami mamy (marnej jakości) rezystor (opór) i kondensator (pojemność), a parametry te zależą od wilgotności skóry i siły ścisku. Zamiast palców dolutowałbym kondensator (niewiwlkiej - trudno zgadnąć jakiej) pojemności : 2,2 pF 4,7pF 10pF 22pF równolegle do AB. Czy masz pewność, że rdzeń cewki porusza się i przestraja?
-
Wzmacniacz mocy [ AUDIO ] - problem ze składową stałą na wyjściu
Marekk odpisał w temacie użytkownika Silver_1 • Zupełnie zieloni
Wyjaśniam, dlaczego sugerowałem słuchawki: otóż niski opór głośnika (4 do 16 omów) zaburza w znacznym stopniu rozkłady prądów w układzie, a w niekorzystnym przypadku może spowodować zwarcie (zniszczenie głośnika i szkody w układzie). Wysokoomowe słuchawki mają 1-4 kiloomy oporu i znikomy wpływ na układ. Niestety najpopularniejsze słuchawki gamingowe mają około 2x32 omy, ale połączone szeregowo 64 omy to zawsze bezpieczniej niż 4czy 8. -
Wzmacniacz mocy [ AUDIO ] - problem ze składową stałą na wyjściu
Marekk odpisał w temacie użytkownika Silver_1 • Zupełnie zieloni
Brak oscyloskopu to nie tragedia. Uruchamianie po jednej gałęzi to słuszne postępowanie. Sugeruję pomierzyć (bez sygnału) i wpisać w schemat napięcia na kolektorach,bazach, emiterach wszystkich tranzystorów. Do badania odsłuchem używałbym słuchawek wysokoomowych, nie głośnika. Domyślam się, że oba punkty "speaker1" są połączone. Przy uruchamianiu potencjometr RV1 ustawiłbym w dolne (wg schematu) położenie. Jaki prąd pobiera układ? -
Miernik ma inne (niższe) odczyty? A czy pomiar był dokonany bez wylutowania rezystorów z płytki?
-
Potwierdzam zdanie przedmówcy i dodam, że trudności w układach rosną z kwadratem częstotliwości. Ale nie jest tak strasznie, bo nie istnieli by krótkofalowcy. 4 waty przy 100 Mhz to dużo, proponuję 2 waty. Przy dobrej antenie, zasięg powinien być na tyle duży, że odpowiednie służby pojawią się szybko. Do rzeczy. W Elektronice praktycznej 5/2000 jest pełny opis nadajnika FM , niemal nie wymagającego strojenia. Dodatkowo jest on opracowany jako kit AVT-864. Można go wykorzystać, lub na jego podstawie samemu wytrawić płytkę. Podobny układzik tylko z mniejszymi tranzystorami popełniłem w latach 80-tych i działał od pierwszego włączenia.
-
Podłączenie kilku przycisków przez ADC do Arduino
Marekk odpisał w temacie użytkownika Mateusz_OA • Arduino i ESP
Proponuje eksperyment myslowy. Tylko myslowy. Co bedzie, gdy wcisniemy jednoczesnie dwa skrajne (pierwszy z prawej i pierwszy z lewej) włączniki ze schematu Mateusza? -
Czesc, zaczne moze od konca. Super film. A co do napedu, serwomechanizmy o momencie 10 Nm ciezko bedzie znalezc, zatem proponowalbym uzycie przekladni slimakowej. Jest samohamowna, nie wymaga zasilania w pozycji "monitor schowany". Co do obliczen, mam wrazenie, ze ramie sily bierze sie od srodka ciezkosci (monitora). Ale i tak wyszlaby sila niepotrzebnie duza. Przyjrzalbym sie podnoszonej bramie garazowej, tam jej ciezar rownowazy (regulowana) sprezyna. Moze podpasowalyby "silowniki" stosowane w podnoszonych drzwiczkach szafek kuchennych. Po zmniejszeniu (wlasciwie: po zrownowazeniu) ciezaru monitora, bedzie wymagany o wiele mniejszy mechanizm napedowy.
-
Platforma z chwytakami na gasienicach
Marekk odpisał w temacie użytkownika Marekk • Projekty - DIY w budowie (worklogi)
Konstrukcja windy wysuwajacej szyje robota przedstawiona na zdjeciach, to nowsza wersja niz na filmie. Dokonane modyfikacje to: przeniesienie napedu na gore (ciagnie winde bezposrednio), dodanie lozysk kulkowych (zamiast slizgowych) do osi z kolami pasowymi, zmniejszenie przelozenia przekladni, dodanie lozyska kulkowego do zebatki srodkowej napedu, dodanie 8 lozysk do samej windy, likwidacja sprezyny naciagajacej pasek zebaty. Efektem jest kilkukrotne zmniejszenie poboru pradu przez naped. Zmienilbym sam rodzaj paska zebatego. Obecnie pasek ma wbudowane nicie stalowe, przez co jest zbyt sztywny. Planuje rowniez rezygnacje z gumy modelarskiej redukujacej ciezar glowy, poniewaz nowy mechanizm (caly nowy kregoslup) bedzie pochylany o 90 stopni (do poziomu), a w takim polozeniu naciag gumowy wrecz przeszkadza w ruchu. Obecnie konstruuje nowy naped ramion robota -
Platforma z chwytakami na gasienicach
Marekk odpisał w temacie użytkownika Marekk • Projekty - DIY w budowie (worklogi)
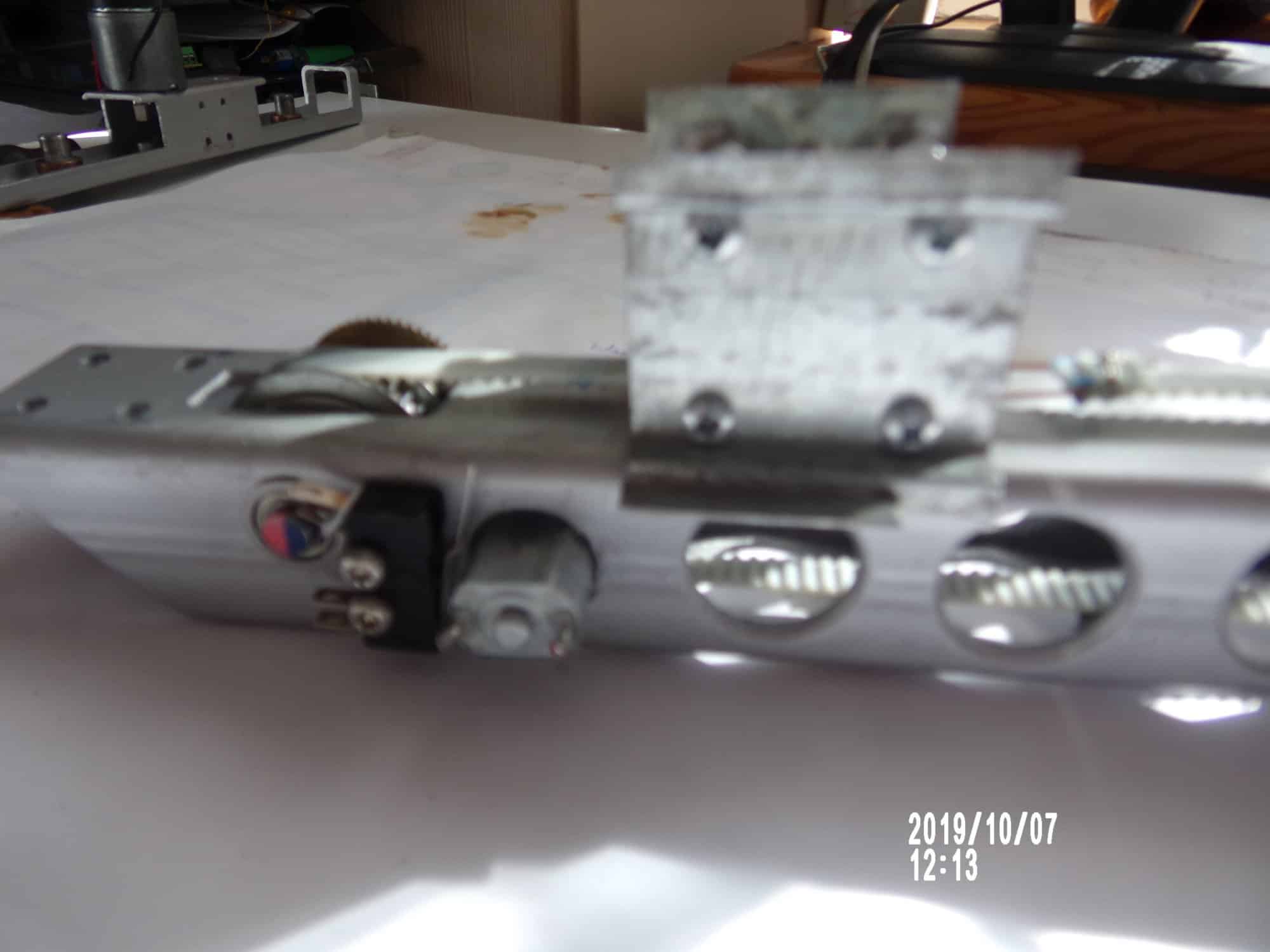
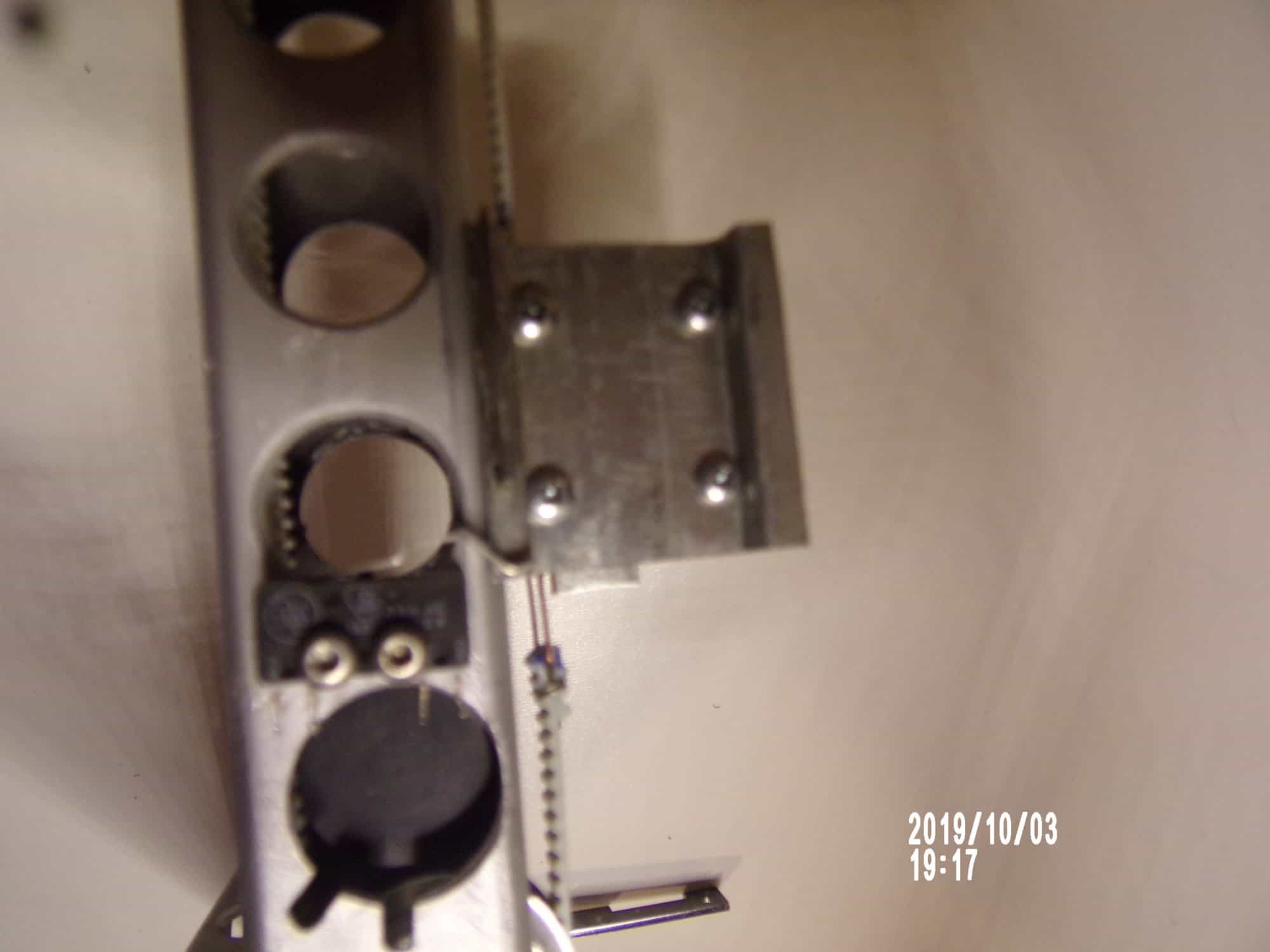
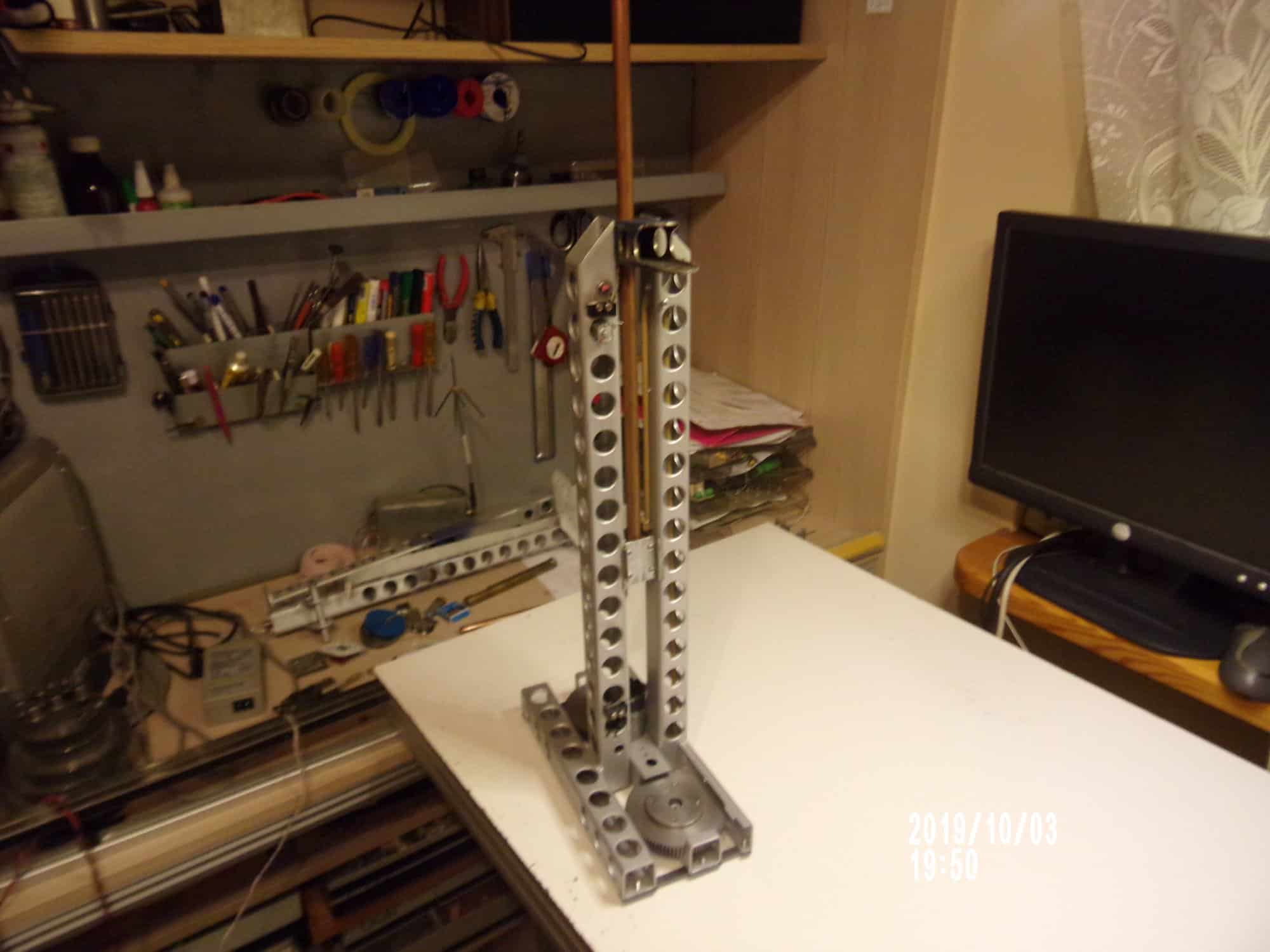
Wielu ciekawi wysuwana szyja. Szyję stanowi miedziana rura srednicy wew/zew 10/12 mm, długości 55 cm, wewnątrz kable do głowy. Rura jezdzi na windzie wyposażonej w 8 łożysk. Winda poruszana jest paskiem zębatym, który wraca wewnątrz kwadratowego dżwigara nośnego. Ciężar głowy równoważy guma modelarska 4x4 cm. Górne koło pasowe jest napędzane silnikiem z przekładnią, dolne koło pasowe połączone jest paskiem gumowym z potencjometrem odczytu. Na górze i na dole są wyłączniki krańcowe. Szczegóły na fotkach:







-
Platforma z chwytakami na gasienicach
Marekk odpisał w temacie użytkownika Marekk • Projekty - DIY w budowie (worklogi)
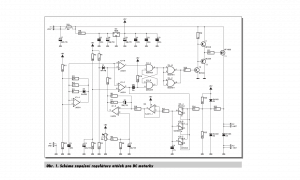
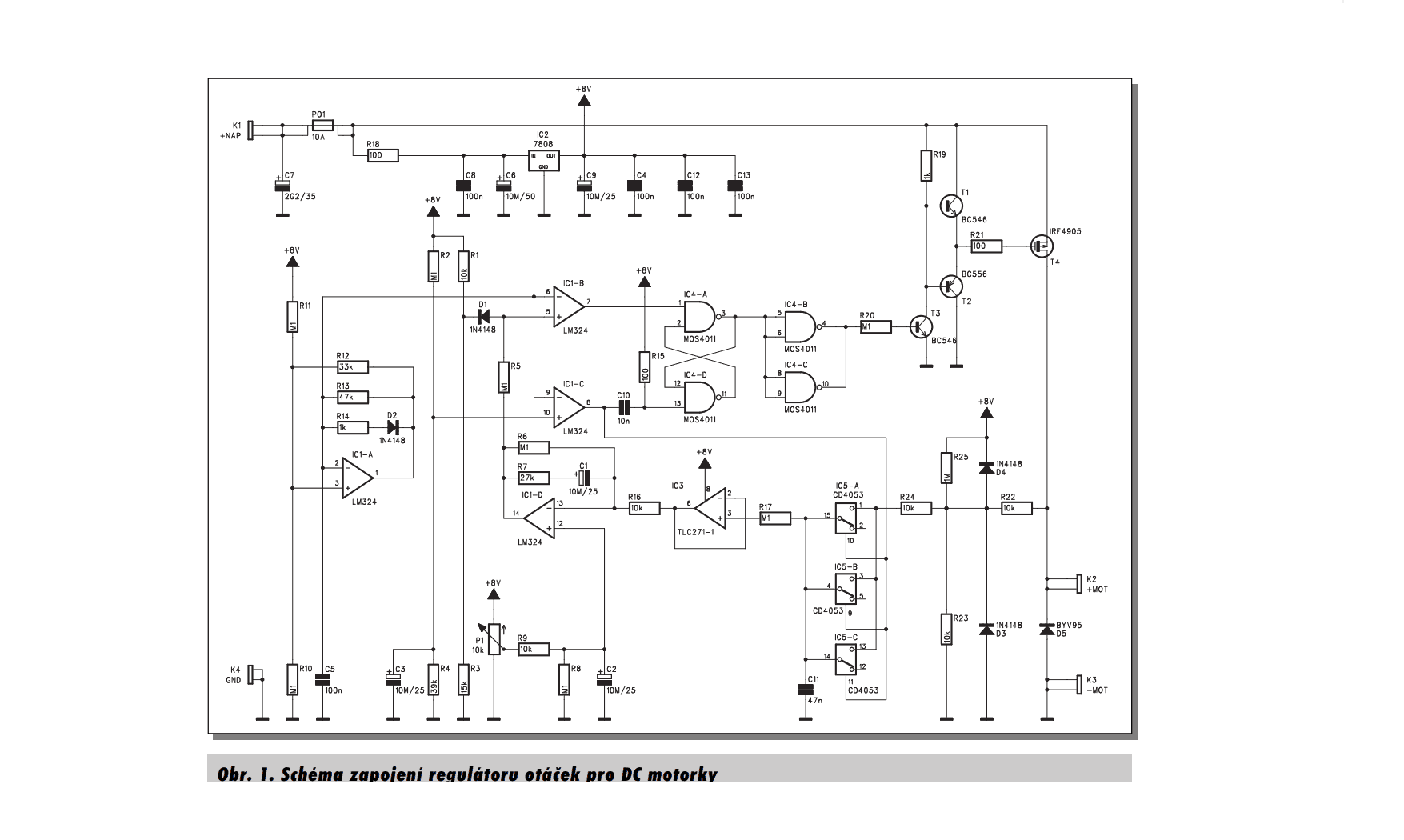
W pierwszej wersji wszystkie silniki były zasilane ze sterownika PWM według schematu „Sterownik silnika DC”. Działało, tyle że prędkość ruchu zależna była od obciążenia. To zrozumiałe gdyż żadnego sprzężenia zwrotnego w układzie nie ma. Wtedy znalazłem schemat „Czeski stabilizator” obrotów. Opublikowany w Amaterske Radio 7/2003. Połączyłem oba schematy i dodałem drugi identyczny kanał. Powstał schemat „Stabilizator obrotów 2 silników”. Działanie układu: Na wyjściu 14 układu LM324 pojawia się sygnał blokujący Mosfety na 10% czasu, tak że PWM może być 0 - 90%. W czasie zablokowania Mosfetów (silniki nie zasilane) ten sam sygnał przełącza układ scalony 4052 i SEM indukowane przez silnik przechodzi przez 10k, 10k, 4052 na kondensator 22n. Napięcie z kondensatora (odpowiadające SEM) buforowane mamy na wyjściu 8 układu LM324. Na wyjściu 1 tego układu napięcie 5v - 0 - 5V zależy od położenia joysticka. Oba napięcia porównuje (?) Układ na wejściach 5 i 6. Jeśli SEM jest za małe, napięcie na wyjściu 7 jest większe i na wyjściu 8 mamy większe wypełnienie PWM. (Jest ograniczane do 90%). Zatem stabilizator dąży do utrzymania napięcia SEM (zależnego od obrotów) bliskiego napięciu zadanemu przez joystick. Tyle teorii. Obroty rzeczywiście stabilizują się, ale dopiero po 2-3 sekundach, co baaardzo utrudnia sterowanie. Układ testowałem na silniku bez przekładni i jakiegokolwiek obciążenia, działał bez widocznej zwłoki. Pod pełnym obciążeniem w realnej konstrukcji startuje z opóźnieniem. Zwykły sterownik PWM był wygodniejszy. Sterownik silnika DC.pdf Stabilizator obrotow 2 silnikow.pdf