



maciejuszek
-
Zawartość
11 -
Rejestracja
-
Ostatnio
-
Wygrane dni
3
Osiągnięcia użytkownika maciejuszek
")





-

Teoretyzowanie przed praktyką #2 - lokalizowanie obiektu w pomieszczeniu
maciejuszek odpisał w temacie użytkownika Treker • Ogłoszenia organizacyjne
Błąd pomiaru wynosi max 2%. Raz przeprowadziliśmy testy na sali o długości 30m. Gdy robot przejechał tam i z powrotem to wartość początkową wskazywał pół metra od faktycznego miejsca startu, co odpowiada szerokości samego robota. Cały system był tworzony tylko do Puck Collect, gdzie czas rozgrywki wynosi 3 min, a plansza jest kwadratem o boku 2,8m. W takich warunkach robot po zakończonym przejeździe myli się średnio o 5cm, co w tej konkurencji jest znikomą wartością. Niestety na tym zakończyła się nasza inwencja twórcza. Żadne lepsze czy gorsze rozwiązanie nie urodziło się w naszych głowach... -
Teoretyzowanie przed praktyką #2 - lokalizowanie obiektu w pomieszczeniu
maciejuszek odpisał w temacie użytkownika Treker • Ogłoszenia organizacyjne
My w Sarmaticku - robotcie klasy "Puck Collect" wykonaliśmy system pozycjonowania przy pomocy myszy komputerowej oraz żyroskopu. Obydwa elementy są zamocowane w środku geometrycznym robota, dodatkowo myszka ma możliwość ruchu względem konstrukcji tylko w pionie - tak aby zawsze dotykała podłoża. Zalety: - poślizg kół nie wpływa na pomiar - nie potrzeba żadnej komunikacji z zewnętrznymi latarniami Wady: - robot musi cały czas przylegać do podłoża - podłoże, po którym jeździ powinno być płaskie i jednolite - lekkie nierówności w podłożu potrafią nieźle namieszać w pomiarze - błąd pomiaru narasta z czasem Metoda ta okazała się wystarczająca do użycia w konkurencji Puck Collect. Informację o położeniu wykorzystujemy do najszybszego powrotu do bazy. W przypadku jeśli pomiar zawodzi (Sarmatic wyznacza, że jest daleko poza planszą, co się zdarza lecz bardzo rzadko) to robot posługuje się czujnikami odległości. -
Lego Mindstorms - jeden czujnik do kilku portów
maciejuszek odpisał w temacie użytkownika Wyimaginowana • Elektronika
Proponuję obejść ten problem inną drogą. Podłącz czujnik do jednego NXT, a do drugiego wartość tegoż czujnika prześlij przez bluetooth. -
Freestyle Robot Wyrzutnia
maciejuszek odpisał w temacie użytkownika maciejuszek • Projekty - DIY roboty
Zestaw, którego użyłem został specjalnie stworzony na konkurs Botball 2009. Podczas rejestracji na zawody trzeba kupić taki zestaw. Każdego roku jest inny, tzn. w jego skład wchodzą inne elementy LEGO, różne czujniki i silniki, ponieważ z każdą edycją zawodów jest inne zadanie do wykonania. Jeśli chodzi o procesor CBC, jest on urządzeniem gotowym do pracy. Posiada on między innymi dotykowy, kolorowy wyświetlacz, własny akumulator, 8 portów wejść cyfrowych, 8 analogowych, 4 porty wyjść na silniki i 4 porty serwo i USB z możliwością podłączenia kamery. Niestety, tak jak wspominałem robot powstał 3 lata temu i szybko został rozebrany. Od tamtego czasu nie miałem z nim styczności, więc jeśli chciałbyś uzyskać konkretniejsze informacje, to zapraszam na stronę sklepu internetowego Botball'a: http://botballstore.org/categories/robot-sets-and-kits -
Witam. Przedstawiam Wam mojego robota o nazwie "Robot Wyrzutnia". Tak, nazwa nie jest dość porywająca, ale całość powstała 3 lata temu, kiedy to miałem jeszcze 15 lat. Robot służy tylko do pokazów, nie ma on żadnego przydatnego zastosowania w życiu codziennym poza zbieraniem piłeczek do tenisa stołowego 😉 Założenia jakie wyznaczyłem sobie przed budową tego robota: - Funkcja pokazowa – robot miał wykonywać prostą, ale efektowną czynność, - Wykorzystanie zestawu startowego z konkursu Botball 2009 w USA, - Uzyskanie nowej wiedzy z dziedziny robotyki Opis działania: Robot zbiera losowo rozrzucone piłeczki do tenisa stołowego z planszy, które następnie trafiają do magazynku. Gdy, robot upewni się, że nie pozostawił żadnego obiektu w swoim otoczeniu, zaczyna szukać źródła światła. Po nacelowaniu się w stronę lampki, strzela do niej zebranymi piłeczkami. Opis konstrukcji: Całość zbudowana jest z elementów specjalnego zestawu na konkurs Botball 2009. Konstrukcja to głównie elementy LEGO i metalowe płytki ze śrubkami. Robot sterowany jest kontrolerem CBC (także wchodzi w skład zestawu konkursowego). Zostały zastosowane następujące czujniki: - odległości (SHARP) – 2 sztuki - namierzanie piłeczek - sprawdzenie, przed wystrzałem, czy w magazynku znajdują się jeszcze piłeczki - linii – 2 sztuki - światła – 3 sztuki - namierzanie światła - dotyku – 2 sztuki - kalibracja ramienia podającego piłeczki do magazynku A także sześć silników: - 2 do poruszania się - 2 użyte w ramieniu zbierającym piłeczki - 1 załadowanie piłeczek do strzału - 1 wystrzał piłeczek Wyrzutnia: Długo szukałem sposobu na wystrzał małych elementów LEGO lub piłeczek. W Internecie znalazłem opis średniowiecznego onagera. Po analizie zbudowałem własną katapultę, w której energia potrzebna do strzału pochodziła ze skręconych poziomo 12 gumek recepturek. Efekt był zaskakujący, ponieważ najmniejsze elementy LEGO były miotane na odległość ponad 12m! Poniżej schemat na którym się wzorowałem: Niestety robot był zbudowany z LEGO, więc został już dawno rozebrany. Pozostały po nim nieliczne zdjęcia oraz jeden film:
-
Freestyle Puck Collect Sarmatic
maciejuszek odpisał w temacie użytkownika maciejuszek • Projekty - DIY roboty
Dzięki za te pozytywne opinie! mactro Zderzenia w tej konkurencji są wręcz nieuniknione, ale to jest także trudność, którą trzeba ominąć 🙂 bulibulibu Nie mylisz się. Projektem zaczęliśmy się zajmować jeszcze w 3 klasie gimnazjum. Teraz mamy ukończone już 18 lat : ) Chumanista, piotreks-89 Niestety aktualnie nie mam dostępu do Sarmatica, powodem czego są wakacje... Trudno mi aktualnie na pytanie o komputer odpowiedzieć 🙁 Jak tylko będzie możliwość to napiszę! -
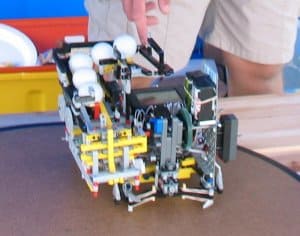
Opiszę robota o nazwie Sarmatic, zwycięzcę konkurencji ”Puck Collect” na konkursie RobotChallenge 2012! Jako, że jest to mało popularna dyscyplina w Polsce, cały projekt powstawał od zera. Na początku nie mieliśmy żadnych informacji o tym jaki typ konstrukcji będzie najlepszy. Powodem czego były długie rozmyślania, projektowanie i ciągłe ulepszanie Sarmatica. Do marca 2012 roku robot ten powstawał przez dwa lata. Postaram się opisać wszystkie rozwiązania jakie zostały użyte podczas startów na konkursach RobotChallenge 2011 i 2012. Puck Collect - Dokładny opis zasad jest przedstawiony tutaj . Konstrukcja została stworzona prawie w całości z tego co udało się zakupić w Castoramie. Aluminiowe kątowniki, ceowniki, masa śrubek i nakrętek. Robot obudowany jest w karton z tworzywa o nieznanej mi nazwie, jednakże jest on bardzo lekki a zarazem odporny na uderzenia. Wymiary: 49 x 49 x 12cm, maksymalnie robot może mieć 50x50cm, a wysokość nieograniczoną. Zdecydowaliśmy się jak najbardziej zwiększyć powierzchnię, aby zbierać naraz jak największą liczbę krążków podczas przejazdu. Napęd Robot napędzany jest dwoma silnikami 37ZYJ002B, 150RPM, 12V. Koła śr.100mm. 2x Hitec HS-1425CR – sortowanie krążków 1x Hitec HS-322 HD – sterowanie bramą wypuszczającą krążki Elektronika Całość jest sterowana przez komputer jednopłytkowy z Windowsem. Obsługa silników, serwo i czujników odbywa się poprzez elementy Phidgest. Są to gotowe urządzenia posiadające porty USB, sterowane bezpośrednio z komputera. Sarmatic posiada: ➡️ Kontroler silników: PHI-1064 ➡️ Kontroler serwo: PHI-1061 ➡️ Kontroler czujników: PHI-1018 ➡️ Wyświetlacz + kontroler czujników: PHI-1203 ➡️ Czujnik przestrzenny 3/3/3: PHI-1056 Dodatkowo czujniki podłączone do kontrolerów czujników: ➡️ 6x Sharp GP2D12 – 2 przód, 2 tył, po 1 na bok ➡️ 5 czujniki światła: PHI-1127 ➡️ 2 czujniki odbiciowe 5mm: PHI-1102 Oraz: Mysz komputerowa w technologii Bluetrack Zasilanie Całość zasilana z pakietu Li-pol 4S 14.8V 4000mAh + 2 zasilacze, po jednym na komputer i silniki. Program Program został napisany w C#, niestety tyle z mojej wiedzy, ja odpowiadam tylko za konstrukcję, a kumpel programuje. Jakby były jakieś pytania to mu je przekażę 😋 Droga krążka 1. Brama ”Tesco” – czerwone elementy na górze obrazka poniżej – zasada działania jest analogiczna do wózków przejeżdżających przez bramki w sklepach samoobsługowych. => Krążki, które zebrał Sarmatic, już nie są dostępne dla przeciwnika. 2. Lejki – żółty kolor – sprowadzają krążki do miejsca sortowania. Dlaczego dwa? – 2x szybsze sortowanie umożliwia szybsze wykonanie zadania. 3. Sortowniki – zielony kolor a) czujnik odbiciowy 5mm sprawdza obecność krążka, b) dwie niebieskie diody oświetlają obiekt i czujnik światła sprawdza jego kolor, c) krążki są rozdzielane na kolory, taki system sortowania w Sarmaticu jest 2x szybszy niż w innych konstrukcjach, ponieważ po przejściu jednego pucka, sortownik jest gotowy do ponownego działania, bez powrotu do pozycji początkowej. Prędkość jaką udało się osiągnąć to 1 krążek/ 0,75 sekundy! Mając 2 sortowniki, nasz robot jest w stanie posegregować wszystkie 20 krążków około 8 sekund : ) (oczywiście najpierw musi je zebrać…) 4. Pojemniki – niebieski – dzielą się na krążki koloru robota (środkowy) oraz krążki koloru przeciwnika (zewnętrzne). 5. Brama – czerwony kolor - Krążki są punktowane wtedy gdy leżą na bazie i nie są przykryte żadną częścią robota, więc wypuszczanie pucków przeciwnika jest zbędne. Dlatego ruchoma brama została zamontowana tylko dla środkowego pojemnika. Rozwiązania ➡️ GPS – dzięki połączeniu myszy komputerowej z żyrokompasem i kilkoma funkcjami trygonometrycznymi, Sarmatic w każdej chwili zna swoje położenie na planszy. Dzięki temu chcąc dojechać do np. na pole startowe, wyznacza odpowiedni azymut i podąża po linii prostej do celu, nie błądząc, szukając odpowiednich ścian i koloru podłoża. ➡️ Ślimak – nasz as z rękawa. Stosowany podczas walki tylko z niektórymi przeciwnikami. W kilka sekund robot potrafi zebrać dużą liczbę pucków. Ślimak został zaprezentowany na jednym z filmów. ➡️ System antyzderzeniowy – kontrolując odczyty z czujników odległości robot potrafi rozróżnić podczas przejazdu czy spotkał przeciwnika, czy dojechał do bandy. W zależności od tego jaki obiekt widzi, wykonuje inne czynności. ➡️ System odblokowania – uruchamia się, jeśli po krótkim czasie robot nie zmienia położenia na planszy (przyblokowany przez przeciwnika i / lub bandy). Następnie wykonuje sekwencję ruchów pozwalających się oswobodzić do czasu odzyskania całkowitej sprawności w poruszaniu się. ➡️ 11 krążków – system oparty na matematyce i logicznym myśleniu : ). Zasada działania jest prosta: po zebraniu 11 krążków (czerwonych i niebieskich) można odwieźć swoje pucki na bazę i zakończyć przejazd. Przeciwnikowi w takim przypadku zostaje 9 krążków, w skład których wchodzi mniejsza ilość pionków jego koloru, niż nasz robot pozostawił na polu startowym. ➡️ Blokowanie bazy przeciwnika – po zebraniu 11 krążków, Sarmatic udaje się na pole przeciwnej drużyny, by ją zablokować. Przeciwnik wtedy ma małe szanse na zdobycie jakichkolwiek punktów. ➡️ Kontrola zablokowanej bazy – byliśmy przygotowani również na to, że przeciwnik także może zastosować wcześniejszy podpunkt. Sekwencja ruchów i kontrola czujników odległości pozwala na zdiagnozowanie zablokowanego pola. Sarmatic w takim przypadku podjeżdża tyłem na bazę, dopychając przeciwnika do bandy (odsłania kawałek bazy), a następnie podjeżdża do przodu, wypuszcza krążki i ponownie przepycha tyłem, tym razem pucki na pole punktowane. Osiągnięcia 1. miejsce - RobotChallenge 2012 - Puck Collect 2. miejsce - RobotChallenge 2011 - Puck Collect 3. miejsce - Roboxy 2012 - Freestyle Ciekawostki RC 2012 -Warto dodać, że tak dopracowany Sarmatic podczas startu w Wiedniu w 2012 roku odniósł w każdej walce zwycięstwo! - Podczas całych zawodów, nasz robot prawidłowo odwiózł do swojej bazy 73 krążki, tracąc przy tym zaledwie 2 krążki! - W fazie grupowej, najgorszym wynikiem jaki uzyskał Sarmatic to 5:0, a wszystko, przez walkower – przeciwnik nie przystąpił do walki… Reszta walk zakończyła się: 6:0, 6:0 oraz 8:0. 🙂 tabela finałowa RC 2012 Zdjęcia Filmy Zwykły przejazd: Ślimak: Blokowanie bazy przeciwnika: Mały bonus - dachowanie 🙂 Autorami Sarmatica są dwaj 18-latkowie, członkowie drużyny R-BOT: Aleksander Szulc - programista Maciej Ziółtkowski - konstruktor

- 9 odpowiedzi
-
- 25
-

-
Micromouse - sprawdzenie schematu
maciejuszek odpisał w temacie użytkownika maciejuszek • Sprawdzanie schematów
Dzięki wielkie za te wszystkie rady. Niedługo postaram się wnieść poprawki i umieścić info o postępach. Niestety niedługo jest zakończenie roku szkolnego - trzeba wyciągać ocenki, więc myślenie o robocie spadło na dalszy plan... Tak w ogóle bardzo się cieszę z tego, że tyle osób chce się dzielić swoją wiedzą i doświadczeniami na Forbocie 🙂 -
Micromouse - sprawdzenie schematu
maciejuszek odpisał w temacie użytkownika maciejuszek • Sprawdzanie schematów
MirekCz Kondensatory low-esr dodam. Carpe Diem Wolę zabezpieczyć mysz w dwa mostki, przy ewentualnym uderzeniem w ściankę i spaleniem jednego mostka. MatManiak Przekonałeś mnie do zastosowania potencjometru. Wymienianie oporników byłoby zbędną zabawą... Dzięki za to złącze. Nawet o tym nie wiedziałem. Czujniki narysowałem samemu. -
Micromouse - sprawdzenie schematu
maciejuszek odpisał w temacie użytkownika maciejuszek • Sprawdzanie schematów
dondu 1. Masz rację. 2. Wiem, ale wolę użyć 6-pinowego niestandardowego złącza, niż 10-pinowej Kandy, tu chcę zaoszczędzić trochę miejsca. 3. Jeszcze nie dobrałem wartości oporników R6-R9, ponieważ będą zależały od napięcia akumulatora oraz odczytów czujników z enkoderów. Wartości wyznaczę dopiero mając te rzeczy pod ręką. Carpe Diem Silniki to Pololu HP 10:1 -
Witam, ostatnio wpadłem na pomysł wykonania Micromouse, więc otwarłem Eagle i narysowałem mój pierwszy schemat robota. Do tej pory pracowałem tylko na gotowych podzespołach, a chcę nauczyć się czegoś nowego. Chciałbym się dowiedzieć, czy schemat poniższy jest poprawny. Liczę na krytykę 🙂

