janec
-
Zawartość
64 -
Rejestracja
-
Ostatnio
Osiągnięcia użytkownika janec
")





-
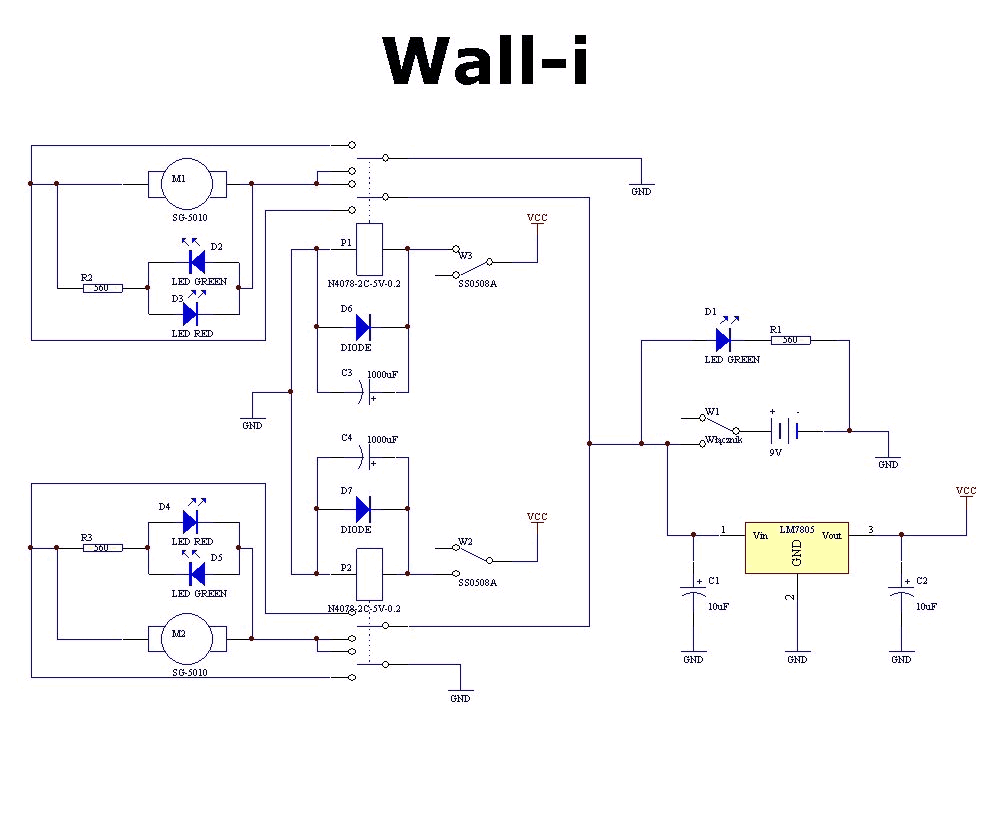
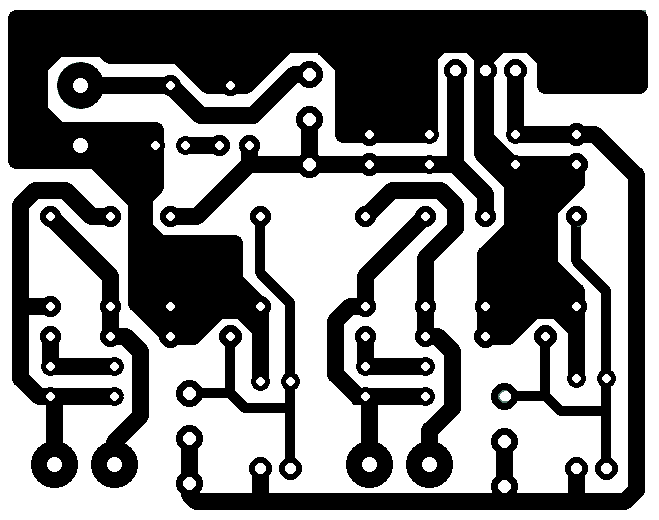
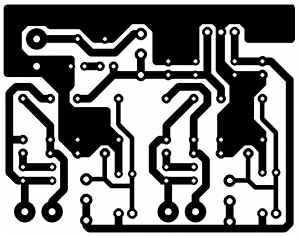
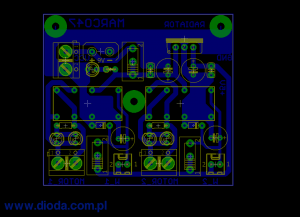
Jest to mój pierwszy robot, który postanowiłem tutaj opisać. Z podjęciem decyzji o wrzuceniu tej konstrukcji na forum zwlekałem dość długo, bo ponad rok (robocik powstał w listopadzie 2010). Wall-i to prosty robocik, na jego powstanie nie wydałem więcej niż 35 zł. Zasada działania również banalna, robot jedzie do przodu, aż czujnik wykryje przeszkodę, wtedy koło po przeciwnej stronie zaczyna obracać się do tyłu tak długo, aż czujnik przestanie wykrywać jakiś obiekt, następnie znów jedzie prosto. 1. Geneza Był to mój drugi robot, który postanowiłem zrobić po "obowiązkowym" światłolubie, jednak ze względu braku znajomości programowania AVR w tamtym czasie pozostałem wciąż przy Beamie - bez mikroporcesora i programowania. Pomysłu nie szukałem daleko, ponieważ schemat konstrukcji znalazłem na forum, dokładnie w tym temacie, użytkownika Le_Cheque, za co bardzo mu dziękuje 🙂 2. Obudowa Obudowę, a raczej platformę robota zrobiłem ze spienionego PCV, które spełnia swoje zadania bardzo dobrze. Do korpusu zamocowany jest napęd, czujniki oraz płytka sterowania. 3. Napęd Do poruszania się robot wykorzystuje przerobione serwomechanizmy HXT900 zakupione na allegro. Nie osiąga on zawrotnych prędkości, ale nie to było ich zadaniem. Koła również są wykonane ze spienionego PCV, lecz o większej grubości, z tego co pamiętam to chyba 8mm. Żeby zwiększyć przyczepność, nałożyłem dętkę od roweru spełniającą rolę ogumienia 😃 4. Czujniki Czujniki to po prostu dwie krańcówki zamocowane z przodu robota. Mają one przedłożone "wąsy", aby wykrywały przeszkody w większym zasięgu. 5. Zasilanie Do zasilania użyłem baterii 9V, jednak nie jest to najlepsze rozwiązania. Robot na jednej baterii może pojeździć maksymalnie 30 minut, więc zmagałem się ciągle z problemem rozładowanych baterii i musiałem biegać do sklepu po nowe, żeby coś przetestować. 6. Elektronika Cała elektronika znajduje się na płytce zamocowanej na samej górze robota. Wytrawianiem zająłem się samodzielnie. Schemat ideowy Ogólnie uważam, konstrukcję za udaną. Osiągnąłem w miarę estetycznego prostego robota. Przepraszam, że nie zamieściłem żadnych zdjęć, ale robiłem tego robocika tak dawno że gdzieś mi się zapodziały, ale jak znajdę chwilę czasu to porobię kilka zdjęć i dorzucę 😉 W ramach rekompensaty umieszczam dwa filmiki prezentujące funkcjonowanie robota. Załączam schemat, wraz ze schematem płytki do wytrawienia.
-
Dzięki za odpowiedzi, teraz jestem zdezorientowany ponieważ zamówienia dokonałem jakies 12 dni temu a zero informacji.. sam nie wiem co teraz z tym zrobić 😃 [ Dodano: 18-07-2011, 13:07 ] wreszcie dostałem odpowiedz, okazało się że mieli urlop.. ? przesyłkę mają mi już wysyłać.
-
bardzo dziwi mnie ta sytuacja, bo sklep wygląda na profesjonalny, a tu takie coś..
-
Witam! 10 dni temu zamówiłem w sklepie programatory.com.pl mieszczacym sie we Wrocławiu, produkty na ponad 400 zł. Po dokonaniu zamówienia otrzymałem automatycznego maila z danymi do zaplaty, wysylki itd.. Pieniądze przelałem na podane konto i od tamtego czasu nie dostałem żadnej informacji, a przesyłka (miała być kurierska) nie przychodziła. Bardzo mnie to zaniepokoiło więc pisałem maile na które nie otrzymałem odpowiedzi, a do sklepu nie można się dodzwonic - "Abonent poza zasięgiem sieci" itd.. Mam pytanie, czy ktoś jeszcze zamawiał coś w tym sklepie i czy miał podobne przygody? Czy sklep w ogóle jeszcze funkcjonuje - pytanie do osób z Wrocławia adres: GOTRONIK PPHU ul. Bystrzycka 69C lokal 17 54-215 Wrocław ostatnie newsy sa z 2010.. Dzięki.
-

Zakupy elektroniczne, zasilacz, stacja itd.
janec odpisał w temacie użytkownika janec • Sprzedam/Kupię/Zamienię/Praca
Chyba jednak zdecyduję się na ZHAOXIN 936D, bo Xytronic nie wiem gdzie mogę dostac w internecie. Chciałbym wrócić do zasilacza, wiecie gdzie można dostać gotowy zasilacz z regulowanym napięciem? -
C-bot to język napisane na cele tej gry. podobna jest tylko składnia. Jeżeli zechesz programowac roboty w języku c/c++ to będziesz musiał się nauczyć czegoś więcej, a funkcje move(); czy goto(); bedziesz musiał napisać samodzielnie 😋 Bascom jest dla tych którzy nie chcą się uczyć c/c++ ale spełnia podstawowe wymagania potrzebne do zaprogramowania robota.
-
Witajcie! Długo mnie tu nie było. Nie wiem czy mnie ktokolwiek pamięta 😋 Dostałem sporo kasy na cele elektroniczne i chciałbym rozbudować(stworzyć) prawdziwy warsztat pracy. Liczę, na pomoc Waszej strony 🙂 Lista zakupow: - stacja lutownicza (rozważam te modele: Xytronic 369, ZHAOXIN 936D) - zasilacz (z regulowanym napięciem, zasilany 230V, jak najwiekszy zakres ale zodowolilby mnie 1V-24V; nie mam żadnych modeli na oku) z tych głównych to chyba tyle..
-
Hehe.. nie do końca.. złącza goldpinowe można samemu zamontować, żebyś mógł sobie silniczki wygodnie wpinać do układu. Kupujesz tą listwę goldpinów i do tego zestaw gniazd(1-pinowe, 2-pinowe itd..) i w te gniazda zaciskasz końcówki przewodów od silnika 😉
-
😃 Ja mam pomysł na zrobienie szkieletów lalek do stop-motion sterowanych komputerowo. Czyli tworzysz animacje szkieletu komputerowo, a następnie zostaje on przełożony na ruch lalki w rzeczywistości. Szkielet musi być oczywiście wyposażony w odbiornik i zestaw siłowników/silników 🙂 Chodzi o to by połączyć animację komputerową z tradycyjną, jednocześnie nie tracić zbytnio na czasie animacji lalki. Taki ruch zostaje odwzorowany na szkielecie, a kamery/aparaty rejestrują wszystko i powstaje film. Ten pomysł powstał ponieważ wcześniej interesowałem się stop-motion i mam na koncie kilka krótkich filmików 😉
-
Nowe pole w profilu - nazwa drużyny/koła
janec odpisał w temacie użytkownika Treker • Dyskusje o FORBOT.pl
Przyłączę się do pytania Mihaua, jeżeli to miałoby sens to osoby wpisujące coś w tym polu musiałyby być skojarzone ze sobą. Coś takiego jak jest na facebook'u: jak nie ma takiej grupy/nazwy to tworzy nową w bazie, a jak jest to ją wybierasz i się do niej dopisujesz 😃 -
Felix, Net i Nika.. fajna książka dla młodzieży 😉
-
Ja przez dłuższy czas (kilka miesięcy) wcale nie używałem gąbki i dawało radę, ale od kiedy ją używam jest o wiele wygodniej, bo Ci się nie "kleją" resztki cyny i topników.
-
W Poznaniu nic nie było widać, same chmury niestety 🙁
-
hibernator, wszystkiego najlepszego 😉
-
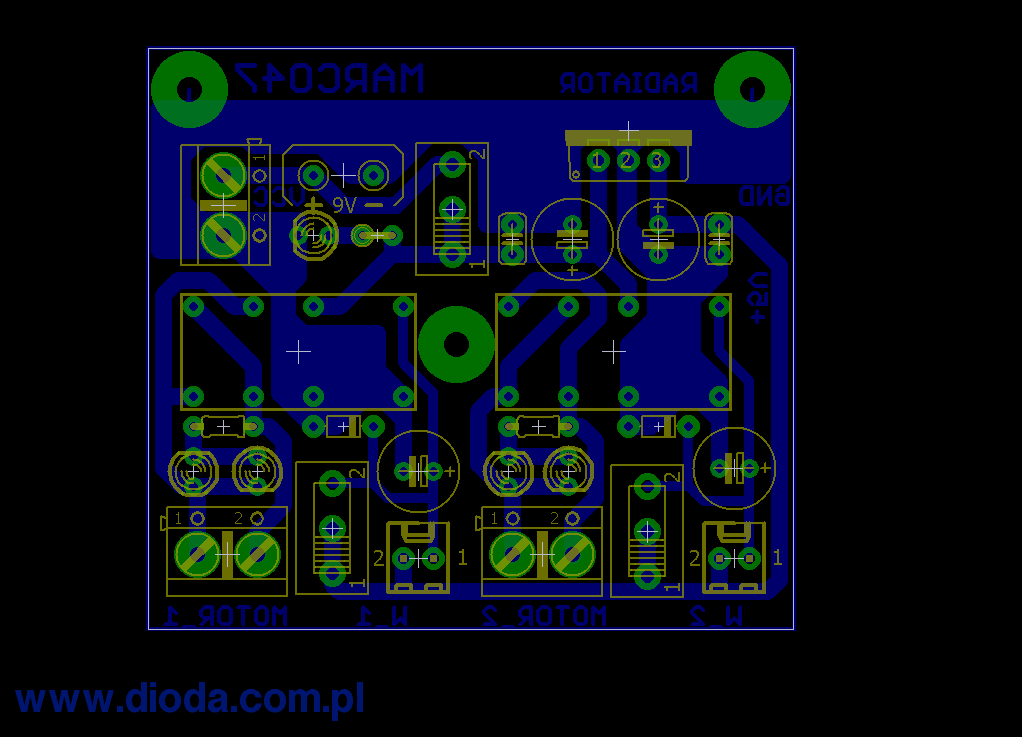
Wreszcie udało mi się dostać te same przekaźniki, które zostały zastosowane w oryginalnym robocie, dokładnie chodzi o N4078-2C-5V. Miałem nadzieję, że to rozwiąże problem, bo napięcie cewki bedzie mniejsze wiec bez problemu załączy. Okazało się, że problem wcale nie tkwił w złym przekaźniku. 😮 Po dwugodzinnym testowaniu i sprawdzianu doszedłem do wniosku, że zasilanie przekaźnika na płytce jest źle poprowadzone. Mogę się mylić, ale został zamieniony + z -. Gdy podłączam zasilanie tak jak to jest zrobione na płytce, to słychać takie delikatne pyknięcie w przekaźniku, a po puszczeniu od razu 'wraca'. Gdy jednak odwracam zasilanie to pyknięcie jest znacznie głośniejsze, a po odłączeniu zasilania dopiero po chwili przekaźnik z powrotem pyka (kondensator się rozładowuje). Doszedłem do tego po dokładnym przeanalizowaniu budowy i działania przekaźnika, który ma w sobie cewkę/elektromagnes, a przecież to, w którą stronę bedzie przyciągać/odpychać zależy od podłączenia zasilania.. 🙄🙂 @edit Od wczoraj dużo się zmieniło. Po wyjęciu przekaźniki przetestowaniu na płytce stykowej okazało, się że błąd jest gdzieś indziej, bo wszystko dobrze działało. Podejrzenie padło więc na diody prostownicze. Zatem odlutowałem je i BINGO! 🙂 Po chwili szukania w Internecie okazało się że kreska na obudowie wcale nie oznacza anody, wręcz odwrotnie - katodę. Problem zatem rozwiązany własnymi siłami 🙂 (długo to trwało, ale przynajmniej się czegoś nauczyłem) Do pełnego skończenia robota brakuje tylko obudowy i silników z kołami - kupię serwomechanizmy. Myślę, że po ukończeniu obiszę całego robota na diodzie, co prawda jest już jeden Wall-i (na którym się wzorowałem), ale na płytce uniwersalnej, mój będzie bardziej zaawansowany bo na własnym PCB 😅