ebundz
-
Zawartość
5 -
Rejestracja
-
Ostatnio
-
Wygrane dni
3
Osiągnięcia użytkownika ebundz
")





-

Microsumo Go - robot klasy microsumo
ebundz odpisał w temacie użytkownika ebundz • Projekty - DIY roboty
Dremel miałam nadzieję wygrać w Rzeszowie 😉 Na razie nie inwestuję w warsztat, KoNaR na zawody wozi dużo sprzętu. Masz rację co do dławika - chciałam, żeby schemat jakoś wyglądał i przy przenoszeniu elementów w roztargnieniu połączyłam je źle, za co przepraszam. Kondensatory są, tylko że w innym miejscu. 😉 Do zasilania wykorzystuję 2 ogniwa. KTIRy odczyty mają dobre, natomiast przy dużej prędkości robota ten "nie nadąża" z ich uaktualnianiem. Poprawiony schemat: -
Microsumo Go - robot klasy microsumo
ebundz odpisał w temacie użytkownika ebundz • Projekty - DIY roboty
Rozumiem o co chodzi, pomysł z dystansami jest ok. 🙂 W tej chwili skupiam się na zmniejszeniu rozmiaru kół - głównie przez nie musiałam wszystko tak bardzo kompresować. Raczej powierzenie pieniędzy niedoświadczonej osobie. 😉 No i dodatkowo rozbieżność pomiędzy typami ringów do sumo na zawodach w Europie i na świecie, a w Polsce. -
Microsumo Go - robot klasy microsumo
ebundz odpisał w temacie użytkownika ebundz • Projekty - DIY roboty
Programowanie nigdy nie było moją mocną stroną, pomimo tego, że algorytmy sterowania sumo należą do najłatwiejszych. Bardziej mnie bawi mechanika i elektronika. [ Dodano: 17-07-2013, 23:54 ] Plany zmiany koloru na czarny oczywiście były, ale przypominało mi się o tym dzień przed zawodami - a należy uważać na sharpy, bo jak już wspominałam, nie palę się do rozkręcania konstrukcji. I tak, warsztat zdecydowanie by się przydał 😃 -
Microsumo Go - robot klasy microsumo
ebundz odpisał w temacie użytkownika ebundz • Projekty - DIY roboty
Załączony obrazek wiele pokazuje, a nie chciałabym ujawniać wszystkiego 😉 Dodam tylko, że potrzebna była przeróbka przekładni, a mianowicie dodany jeden otwór. -
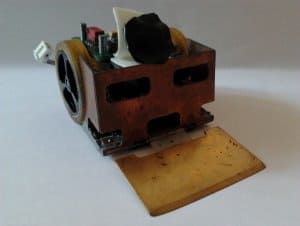
Cześć, chciałabym przedstawić swoją konstrukcję - robota klasy microsumo. Zaczynał swoją karierę już w Wiedniu, jednak dopiero teraz znalazłam czas na opisanie go na tym forum. Na początek parę słów o nazwie Go. Wzięła się ona stąd, że wcześniej planowałam zbudować robota klasy sumo, jednak koło naukowe odrzuciło mój wniosek. Sumo miało nazywać się Godzilla. Po zmniejszeniu rozmiaru robota zmniejszeniu uległa też nazwa robota. 🙂 Jeśli chodzi o mnie, to jestem studentką Automatyki i Robotyki na Politechnice Wrocławskiej, a swoją przygodę z kołem naukowym KoNaR zaczęłam półtora roku temu. Go powstawał od czerwca zeszłego roku i zajmował już wysokie miejsca na zawodach w Polsce. W planach mam stworzenie podobnej konstrukcji, mając na uwadze wszystkie poprzednie błędy i potknięcia, które nierzadko przytrafiały mi się jako początkującej. 1. Konstrukcja mechaniczna Projekt mechaniczny wykonałam w programie Autodesk Inventor. Biblioteki niektórych części, na przykład silników znalazłam na forum elektroda.pl, resztę zaprojektowałam sama. Podwozie jest wykonane z mosiądzu (w celu obniżenia środka ciężkości), a do niego przyczepiony jest pług. Przyznam, że ta część konstrukcji była wyzwaniem. Jak zmieścić zawiasy mając do wykorzystania zaledwie 2 mm miejsca? Po długich poszukiwaniach znalazłam odpowiednie zawiasy modelarskie, bardzo cieniutkie, które sprawdzają się idealnie. Pochyła przednia ścianka obudowy pozwala na stabilne oparcie pługu, ale krzywizna jest na tyle mała, aby po gwałtownym skręcie ten mógł opaść. Pomimo maksymalnego upakowania elementów uważam, że ta część konstrukcji posiada swoją zaletę. W prawie wszystkich walkach pług zdołał opaść i robot skierowany na przeciwnika zawsze "zabierał" go ze sobą. Na początku pług miał długość 45 mm, bo "zawsze można skrócić". Niestety, w Wiedniu okazało się, że po wypchnięciu przeciwnika, a raczej w trakcie wypychania dotykał on podłoża, co powodowało wygraną przeciwnika. Nie przejęłam się tym za bardzo, ponieważ to i tak były pierwsze zawody Go. W tej chwili pług jest długości około 25 mm i sprawdza się doskonale. Dalsza część konstrukcji to koła Pololu o średnicy 32 mm. Nie jest to najlepsze rozwiązanie, ponieważ mogły być dużo mniejsze, ale nie pomyślałam o tym, aby znaleźć kogoś, kto by mi takie felgi wytoczył. Opony były odlewane z poliuretanu, żeby miały lepszą przyczepność. Obudowa robota to wyfrezowane kawałki laminatu z otworami na czujniki. Nadają one Go wygląd creepera. Najgorsze i najbardziej beznadziejne rozwiązanie, którego absolutnie nie polecam to składanie robota w "kanapkę". Cztery śruby mocowały do podwozia 2 płytki z elektroniką oraz silniki. Złożyłam robota raz i mam szczęście, że jeszcze nic się nie zepsuło na tyle, aby to rozkładać ponownie. Jakość wykonania ręcznie robionych obejm z laminatu jest słaba na tyle, że wszystko wchodzi dosłownie na wcisk, jest krzywe i trzeba całą tę "kanapkę" stabilizować i podtrzymywać podkładkami i nakrętkami , których wkręcenie zajmuje wieczność. Silniki zostały przylutowane do płytek z laminatu. W silnikach Pololu HP z przekładnią 50:1 zastosowano patent z odwróconą przekładnią, przez co można je było umieścić obok siebie. Obie płytki z elektroniką zostały połączone długimi goldpinami. Oczami robota jest pięć cyfrowych sharpów GP2Y0D340K - 40-centymetrowych czujników odległości. Dodatkowo, w podwoziu zamontowano 4 czujniki białej linii KTIR0711S, ale ostatecznie ograniczyłam się do dwóch z przodu (trzeci się zepsuł, a czwarty nie działał ...). Każdy z czujników odbiciowych był przylutowany do osobnej płytki o wymiarach 4x9 mm, które robiłam własnoręcznie. Z główną płytką są połączone kablami. Na wierzchu widoczny jest też konarowy moduł startowy bezpośrednio przylutowany do goldpinów, a także dociążenie z postaci płatków ołowiu bezpośrednio przyklejone do czujnika. Nie jest to zbyt eleganckie rozwiązanie, ale powstało na szybko na ostatnich zawodach. Waga robota to 98g. 2. Elektronika Schemat stworzony został w programie Altium Designer. Całością zarządza mikrokontroler ATmega88. Do sterowania silnikami wykorzystałam popularny podwójny mostek H - TB6612. Jak już wcześniej wspomniałam, czujniki znajdują się na osobnych płytkach, natomiast na głównej są tylko złącza. Poza tymi od czujników jest też złącze do programowania i zasilające. Silniki są zasilane bezpośrednio z baterii. Natomiast cała logika oraz czujniki są zasilane ze stabilizowanego 5V. Wykorzystałam w tym celu 2 stabilizatory: MCP1825S-5002E/DB (czujniki) oraz TC1185-5.0VCT713. Robot jest bardzo szybki i wiele razy uciekał z ringu, dlatego wygodnym jest zdalne włączanie go, a zwłaszcza wyłączanie. Wadą jest brak komunikacji z robotem - przeoczyłam wyprowadzenie złącza do UARTa. Ponieważ miejsca pomiędzy podwoziem a silnikami jest bardzo mało (8 mm) dopiero po paru miesiącach udało mi się zakupić ogniwa Li-Polymer o wymiarach 3x15x20 mm sztuka i napięciu 3.6V. Pojemność 120mAh jest wystarczająca do stoczenia 3 walk po 3 rundy. 3. Oprogramowanie Kod programu został oparty o program CeBOTów - robotów microsumo stworzonych jako prezentacja KoNaRu na targach CeBIT 2013. Autorem programu jest Bartosz Wawrzacz (Baton). Nie ma w nim niczego skomplikowanego, po prostu algorytm: "znajdź i wypchnij, a jeśli zobaczysz białą linię - uciekaj". 4. Podsumowanie i wnioski Budowa Go nauczyła mnie budowy robota od podstaw - od obsługi programów typu Altium Designer lub Autodesk Inventor po praktyczne zastosowanie elektroniki, czego nie uczą nas na studiach. Robienie czegoś tak małego było sporym wyzwaniem. Na początku projektowania musiałam sobie zrobić sześcian o boku 5 cm z papieru, żeby uświadomić sobie skalę przedsięwzięcia. Jestem bardzo zadowolona też z tego, że moja konstrukcja pomimo wielu błędów i pomyłek jest w stanie mierzyć się z innymi i w dodatku wygrywać. Moje najbliższe cele to dopracować projekt i zbudować nowego robota tej samej klasy. A później może spróbować zmniejszyć jeszcze rozmiar, może w nanosumo. Albo femtosumo, żeby Felek miał z kim walczyć. Sukcesy Go to jak na razie: RobotChallenge 2013 (Wiedeń)- 1/8 finału - poniżej najważniejsza finałowa walka, widać na niej, że pług jest ewidentnie zbyt długi, przez co Go przegrał. Robo~motion 2013 (Rzeszów) - 2. miejsce Walka z ruchomym przeciwnikiem: Z nieruchomym też daje radę: A tutaj jeszcze widać, że niezbyt boi się białej linii, co też muszę poprawić: Robocomp 2013 (Kraków) - 1. miejsce, ale muszę przyznać, że konkurenci nie dopisali. Będę wdzięczna za wszelkie uwagi. 🙂