d8vit
-
Zawartość
36 -
Rejestracja
-
Ostatnio
-
Wygrane dni
1
Osiągnięcia użytkownika d8vit
")





-
Automat do gier + głośniki i schładzarka do napojów, Raspberry Pi
d8vit odpisał w temacie użytkownika Jozu • Projekty - DIY
@InspektorGadzet tak zabierają komputery... http://e-play.pl/nielegalny-hazard-w-kawiarence-internetowej/ . Taki mamy klimat. -
Automat do gier + głośniki i schładzarka do napojów, Raspberry Pi
d8vit odpisał w temacie użytkownika Jozu • Projekty - DIY
Dobrze że pozbyłeś się rolek z dolnej części automatu! W naszym kraju za posiadanie automatu hazardowego lub nawet części składowych grodzi wysoka kara do 3 lat więzienia i nawet 100 tys zł, Więc uważał bym z takimi automatami. Do poczytania Art. 107d KKS.- 8 odpowiedzi
-
- 2
-

-

-
- Raspberry Pi
- gry
- (i 1 więcej)
-
Freestyle Model autonomicznego wózka magazynowego (AGV)
d8vit odpisał w temacie użytkownika d8vit • Projekty - DIY roboty
Dzieki za dobre słowo 😉 Robot jest całkowicie autonomiczny, takie były założenia projektowe. Aplikacja na smartphonie może byc równie dobrze zastapiona terminalem etc. w planach jest rozwiniecie projektu o aplikacje zarządzającą systemem magazynowym i kilkoma robotami jednocześnie (magisterka) ale to już zupełnie inny temat. Smartphon dostarcza tylko informacji o ładunku (miejsce pobrania,dostarczenia, kod ładunku), wyznaczanie trasy przejazdu wykonywane jest juz na pokladzie robota, tak jak i caly proces transportu. W tym czasie do terminala (smartphonu) przesylane są informacje o aktualnym stanie robota. W krytycznych przypadkach( niezgodnosc ładunku, zbyt dlugie oczekiwanie na usunięcie przeszkody itp.) robot wysyła do terminala zapytanie i oczekuje na decyzje. -
Freestyle Model autonomicznego wózka magazynowego (AGV)
d8vit odpisał w temacie użytkownika d8vit • Projekty - DIY roboty
Konstrukcja jest wykonana z laminatu sklano-epoksydowego dwustronnie miedziowanego, elementy sa laczone spoiwem lutowniczym. Na koniec calosc zostala polakierowana. -
Freestyle Model autonomicznego wózka magazynowego (AGV)
d8vit opublikował temat w Projekty - DIY roboty
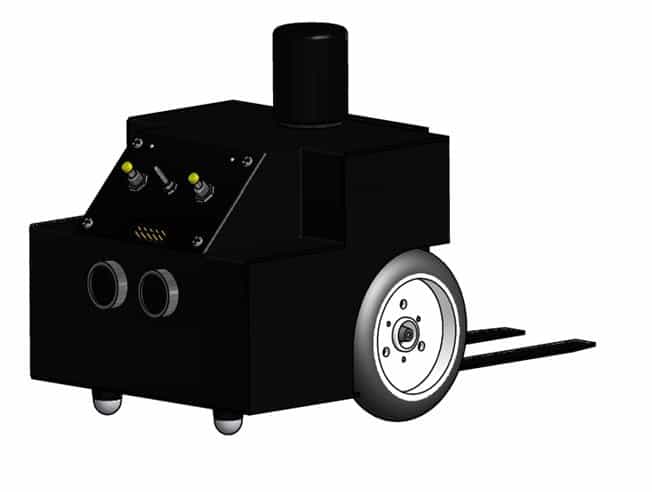
Witam. Chciałbym zaprezentować konstrukcję która była tematem mojej pracy inżynierskiej. Przedmiotem pracy było opracowanie struktury autonomicznego wózka magazynowego. Główne cele jakie miała sprłniać konstrukcja to: - Ustalenie trajektorii ruchu wózka na podstawie lay-out’u wybranego fragmentu hali montażowej z naniesieniem linii dla czujników odbiciowych. - Zasada określenia pozycjonowania wózka we współrzędnych hali -odbiór za pomocą modułu Bluetooth informacji weryfikowanych za pomocą kodów RFID o zgodności ładunku, miejsca odbioru i dostarczenia. - Optymalizacja trasy bezkolizyjnego przejazdu z wysyłaniem danych za pomocą interfejsu Bluetooth do urządzenia kontrolującego i podglądu trasy. - Dobór zestawu czujników odpowiadających za bezpieczeństwo poruszania się po magazynie. Mając wcześniejsze doświadczenie z konstruowania podobnych konstrukcji opisane tutaj zdecydowałem się po raz kolejny na konstrukcję z laminatu . Konstrukcję wykonano jako robot mobilny klasy (2,0) – unicycle. Jako napęd zastosowane zostały podwójna przekładnia Tamiya 70168 w konfiguracji przełożenia 115:1 wraz z kołami Tamiya 70111. Podnośnik to konstrukcja własna zbudowana na łożyskach liniowych z napędów CD oraz pręcie gwintowanym (przekładnia liniowa) który poruszany jest silnikiem DC poprzez przekładnię zębatą. Jako czujniki położenia podnośnika zastosowane zostały dwie krańcówki mechaniczne. Robot porusza się po torze wyznaczonym przez czarną linię (linefolower), z naniesionymi znacznikami punktów załadunku/rozładunku przesyłki. do wykrywania lini zastosowana jest listwa pięciu czujników cny70, krańcowe czujniki wysunięte są o 3mm do przodu. Robot na podstawie znanego miejsca startu i wcześniej zaprogramowanej mapie layoutu, po podaniu danych przejazdu (punkt pobrania, punkt dostarczenia, numer ładunku), wyznacza optymalną trasę przejazdu. Poruszanie się po hali montażowej wiąże się z koniecznością wykrywania przeszkód znajdujących się na trasie przejazdu. do tego celu zastosowane są 2 sharp GP2Y0A41SK0F w przedniej części robota, które służą tez do pozycjonowania robota względem pobieranego ładunku. W tylnej częsci został umieszczony czujnik ultradźwiekowy HC-SR04 wykrywa przeszkody znajdujące sie za robotem głównie podczas nawrotów robota. Jednym z założeń projektu była identyfikacja pobranego ładunku i sprawdzenie jego zgodności, do tego celu został zastosowany gotowy moduł MP01611 Mera-Projec. Modół ten to czytnik RFID ze zintegrowaną anteną, współpracuje on etykietami UNIQUE 125 kHz zainstalowanymi w paletach. Komunikacje robota zapewnia moduł bluetooth HC-06 współpracujący z aplikacją na smartphonie. Elektronika składa się z kilku modułów. Wszystkie moduły połączone są z płytą główną. Sercem układu jest mikrokontroler Atmega32 zasilany przez stabilizator D24V6F5. Do sterowania silnikami kół zastosowany jest mostek TB6612FNG, a podnośnikiem steruje popularny L293d. Całośc zasilana jest ogniwem litowo-polimerowym o pojemności 800mAh i napięciu 7,4V (2S). Robot posiada uchylną klapę co zapewnia łatwy dostęp do wnętrza. Program został napisany w Bascomie co nie było łatwym tematem ze względu na brak wielu funkcji (np.tabela wielowymiarowa), co zmotywowało mnie teraz do nauki języka C. Schemat blokowy programu. Film przedstawiający robota podczas pracy wraz z zrzutem obrazu z aplikacji androidowej: Pozdrawiam.
-
3 x Sharp 0A41SK sprzedam lub zamienie
d8vit odpisał w temacie użytkownika ciuupa • Sprzedam/Kupię/Zamienię/Praca
Temat aktualny? Jeśli tak to wezmę wszystkie 3 czujniki. -
BOTLAND - Wszystkie produkty Pololu - sprzedaż
d8vit odpisał w temacie użytkownika ownya • Sprzedam/Kupię/Zamienię/Praca
Od wczoraj nie mogę zrealizować zamówienia, "Oops, something went wrong." Jakieś problemy ze stroną sklepu? -
Rozbudowa Linefollowera o moduł radiowy. Co wybrać?
d8vit odpisał w temacie użytkownika klawiszu • Elektronika
Prościej będzie chyba zastosować najtańszy moduł bluetooth. -
[Sprzedam] silniki, koła i inne pierdoły kupione w Botland
d8vit odpisał w temacie użytkownika oktan • Sprzedam/Kupię/Zamienię/Praca
Ogłoszenie dalej aktualne? -
Minisumo FRodo – robot monisumo o niekonwencjonalnej budowie
d8vit odpisał w temacie użytkownika zuba1 • Projekty - DIY roboty
Konstrukcja bardzo ciekawa, jak widać prostota jest kluczem do sukcesu. Możesz powiedzieć coś o "mocniejszych silnikach" które zastosowałeś w przekładniach? -
Atmega16A, btm-222 nie wysyła znaku
d8vit odpisał w temacie użytkownika kamien07pk • Mikrokontrolery
Próbowałeś zmieniać prędkość komunikacji modułu BTM przez komendy AT? Najpierw najlepiej spróbuj zrobić pętle i podpiąć moduł do komputera i z komputera wysyłać dane które odbierasz następnie też tym samym komputerem przez bluetooth. -
Moduł bluetooth z allegro za 40-50 zł taniej sie już chyba nie da... A już na pewno nie tak łatwo.
-
[Minisumo] Black Red White
d8vit odpisał w temacie użytkownika d8vit • Projekty - DIY w budowie (worklogi)
Właśnie nad tym pracuje. Celem jest wykonanie czegoś ze złomu bez dodatkowych kosztów. Dwa silniki z przekadniami od kamery mają fajny moment i przyzwoite obroty jest tylko problem z upakowaniem wszystkiego w miarę zwartą konstrukcję. Miejsca jest niewiele, ale tu tkwi cała zabawa. -
[Minisumo] Black Red White
d8vit odpisał w temacie użytkownika d8vit • Projekty - DIY w budowie (worklogi)
Witam po dłuższej przerwie. Długo nic sie nie działo więc koncepcja się nieco zmienia, robot w obecnej formie już na siebie zarobił (czyt. zwolnił mnie z kilku egzaminów:D). Przyszła pora na zmiany. I tak powoli montuje sie sonar na servie, kompletna przebudowa elektroniki, w zasadzie pozostanie tylko buda i przekładnie na starym miejscu. Głównym celem w tej chwili jest sterowanie bluetooth z androida które puki co działa z terminala (pozostało napisać APK dla androida, ale to już w długie zimowe wieczory:) I z dzisiejszych wypocin taki mały gratis:) Robot zostanie chyba przechrzczony i stanie się wielozadaniowym:) -
Jaką konfiguracje przełożenia zastosowałeś? Bardzo zgrabna konstrukcja aż zaskoczyła mnie prędkością.