cassius17
-
Zawartość
6 -
Rejestracja
-
Ostatnio
-
Wygrane dni
1
Osiągnięcia użytkownika cassius17
")





-
Ja mogę polecić krzesła firmy profiM. Może uda się wyrwać w cenie do 1000zł.
-
Freestyle Dwukołowy robot balansujący
cassius17 odpisał w temacie użytkownika asdpii0 • Projekty - DIY roboty
Tak, łatwiej jest sterować takim robotem, kiedy środek ciężkości jest jak najdalej od osi obrotu kół. -
Freestyle Robot balansujący z wahadłem chaotycznym
cassius17 odpisał w temacie użytkownika cassius17 • Projekty - DIY roboty
Otrzymałem ocenę bardzo dobrą 🙂 -
Freestyle Robot balansujący z wahadłem chaotycznym
cassius17 odpisał w temacie użytkownika cassius17 • Projekty - DIY roboty
Wahadło zostało dodane, aby sprawdzić działanie różnych algorytmów sterujących w przypadku wymuszeń, których nie da się wyliczyć, określić, jak to jest w przypadku wahadła chaotycznego. -
Zdobądź Proxxona FBS 240/E - #8 - Mój robot
cassius17 odpisał w temacie użytkownika Komentator • Zawody/Konkursy/Wydarzenia
Niniejszym zgłaszam do konkursu mojego robota balansującego z wahadłem chaotyczny. Robot wyróżnia się dodatkowym elementem w postaci wahadła chaotycznego wykonanego w technologii druku 3D, które zostało dodane w celu wymuszenia zakłóceń w trakcie pracy robota. Link do mojego robota: https://www.forbot.pl/forum/topics7/inny-robot-balansujacy-z-wahadlem-chaotycznym-vt11777.htm -
Freestyle Robot balansujący z wahadłem chaotycznym
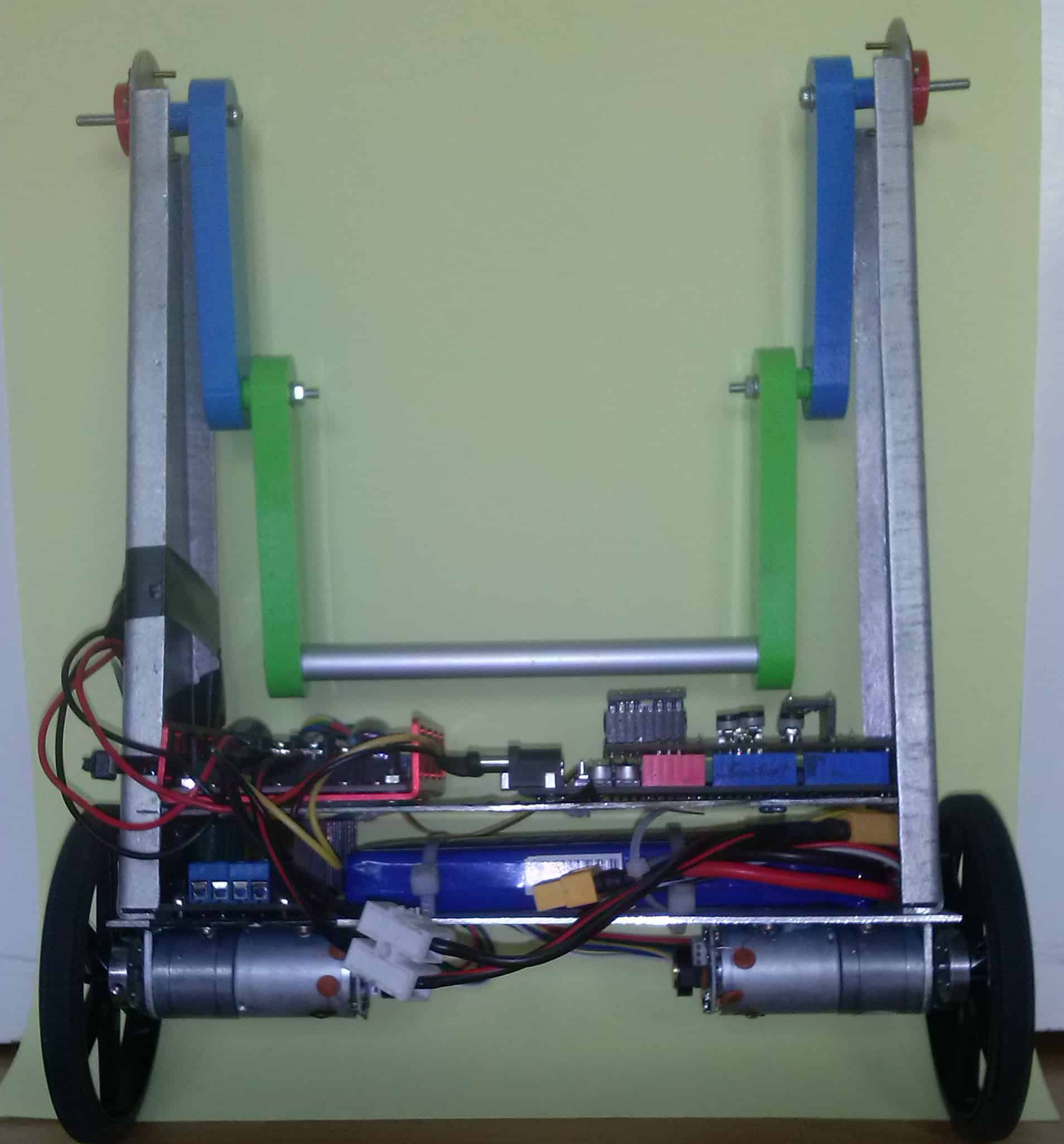
cassius17 opublikował temat w Projekty - DIY roboty
Witam wszystkich Forumowiczów, chciałbym przedstawić Wam robota, którego zbudowałem w ramach pracy magisterskiej. Głównym jej założeniem było przetestowanie różnych algorytmów sterujących, takich jak rozwiązania regułowe, prosty regulator P czy też regulator PID. W tym poście zaprezentuję jedynie część całego projektu, tzn. wykonanie symulacji w środowisku komputerowym oraz wykonanie robota. Symulacja robota Symulacja w środowisku v-rep została przeprowadzona, aby wstępnie określić czego można spodziewać się po algorytmach sterujących badając obiekt rzeczywisty. Symulacja została przeprowadzona w środowisku v-rep w połączeniu z oprogramowaniem Matlab, które pełniło rolę kontrolera symulacji. Remote API umożliwiło łatwe sterowanie symulacją a następnie wyciągnięcie danych z symulacji na temat położenia robota (jego wychylenia). Aby zasymulować robota w środowiku v-rep, podjęto następujące kroki: 1. Eksport modelu ze środowiska Inventor do formatu akceptowanego przez środowisko v-rep (stl), 2. Import plików stl, 3. Rozbicie zaimportowanego złożenia na pojedyncze elementy, 4. Połączenie elementów w większe grupy dla łatwiejszej pracy, 5. Wykonanie kopii modelu w nowej scenie - zamiana elementów na bryły wypukłe, 6. Nadanie bryłom wypukłym właściwości dynamicznych, 7. Połączenie modelu statycznego z modelem dynamicznym, 8. Nadanie więzów - połączeń między elementami Import plików stl do v-rep: Zamiana elementów na bryły wypukłe: Nadanie więzów między elementami: Gotowa symulacja: Wykonanie robota Robot składa się z dwóch głównych części: mechanicznej i elektronicznej. Cześć mechaniczna Tą część dodatkowo możemy podzielić na: Stelaż robota Wykonano go z blachy aluminiowej o grubości 2 mm, który tworzą następujące elementy: panele boczne, podstawa, półka na elektronikę; Wahadło chaotyczne Technika druku 3D umożliwiła wykonanie wahadła. Złożone jest z pięciu komponentów: dwa górne i dwa dolne ramiona wahadała oraz poprzeczki łączącej strony wahadła; Mocowanie silników Są to elementy gotowe przeznaczone dla mocowania silników typu 25D (25 mm średnicy zewnętrznej); Silniki Są częścią układu napędowego odpowiedzialnego za utrzymanie zadanej pozycji robota. Zawierają w sobie przekładnię zębatą 34:1 oraz enkodery kwadraturowe. W trakcie wykonywania wahadła napotkano na często występujące zjawisko skurczu w trakcie druku gniazd łożyskowych. Lekkie podszlifowanie wydruku rozwiązało problem. Układ sterowania Do wykonania układu sterowania wykorzystano następujące komponenty: Platforma prototypowania DfRobot Mega2560 (Arduino Mega2560) Sterownik silników Roboclaw 2x15A IMU MPU - 9150 Konwerter napięć TTL Robot zasilany był z akumulatora 3S poprzez przetwornicę napięcia. Poniżej znajduje się schemat połączeń układu sterowania: Informację o wychyleniu robota wyciągnięto z MPU-9150 poprzez DMP = cyfrowy procesor ruchu, który przeliczał, a następnie udostępniał wprost informacje o kącie wychylenia w stopniach. Podsumowanie W trakcie budowy napotkano problemy z zakłóceniami szyny i2c łączącej IMU z Arduino przez silniki. Jedynym rozwiązaniem było przeniesienie IMU powyżej silników, wprost na Arduino. Drugim dużym problemem były luzy w przekładni zębatej silnika przez co ruch robota nie był płynny i nie udało mi się go wystroić, tak jakbym sobie tego życzył. Po za tymi mankamentami udało się uzyskać wyniki z badań symulacyjnych i rzeczywistych. Zgodnie z moimi obserwacjami jedynym algorytmem - z tych testowanych, który się sprawdził był regulator PID. Na końcu krótki film z działania.