Bogus1
-
Zawartość
30 -
Rejestracja
-
Ostatnio
Osiągnięcia użytkownika Bogus1
")





-
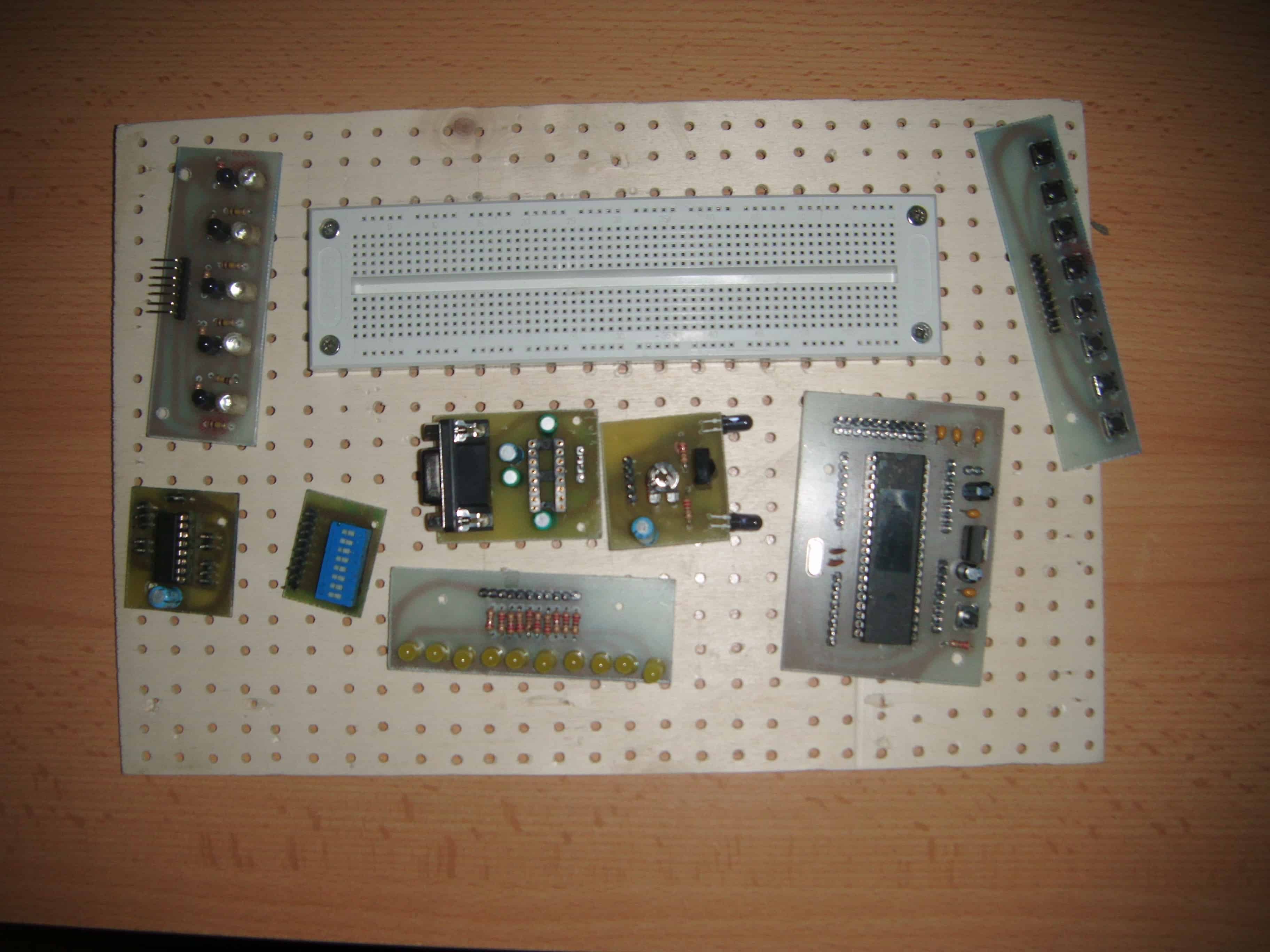
Edubot Edubot jak nazwa wskazuje jest to edukacyjny robot. Rzeczą która go wyróżnia wśród elebotów itp. jest to że można go rozbudowywać jak się nam podoba, poza tym niektórych modułów można użyć w np. platformach wielozadaniowych. Robot składa się z podwozia z dziurkami i płytką stykową, silnika z przekładnią i kołami, modułów elektroniki, a wszystko to łączy się przy użyciu śrubek M3 i kabelków z goldpinami żeńskimi. Podwozie Zostało wykonane ze sklejki pochodzącej ze skrzynki (pod stykówką jest uchwyt). Otwory mają 3mm średnicy są oddalone od siebie o 10mm z przodu znajduje się ślizg kulkowy jako podpora. Ma wymiary miej więcej jak kartka A4(28cm x 19cm) Oczywiście można je wykonać z laminatu, pleksy, stykówka ma 750 pól, gdzieś widziałem płytki które mają 290 pól, płytka została przykręcona na 4-ry wkręty do drzewa. Przekładnie Silniki i koła pochodzą z jakiś zabawek, koła pasowe z magnetofonów, a całość jest zmontowana na kawałku listwy. Niestety nie została ukończona z powodu problemów z tokarką, w weekend może ją skończę. Elektronika Mikrokontroler (uc) To jest mózg całej konstrukcji na płytce znajduje się wszystko co jest potrzebne do prawidłowego działania czyli uc, kwarc, kondensatory, stabilizator, goldpiny. Jest on programowany przez: RS-232 Do tak dużych uc nie warto jest dawać złącz pod programator lepiej na stykówce wgrać bootloader a później programować przez tą przejściówkę do komunikacji z komputerem używam kabla RS 232=>USB Schemat pochodzi z książki M.Wiązani programowanie mikrokontrolerów avr w języku bascom. Bootloader przedstawię w najbliższym czasie. Mostek H Na płytce znajduje się popularny L293DNE z wprowadzeniami pod uc i silniki. Enkodery W pełni skopiowane z elebota służą do mierzenia prędkości silników. można zastosować enkodery z tego projektu Czujnik linni Jest on oparty na fototranzystorach i diodach IR (podczerwonych). Działa na tej zasadzie że światło podczerwone odbija się lepiej od białej powierzchni niż od czarnej, nawet jeśli się jakieś promienie się odbiją to zostaną nie wykryte przez uc dzięki zastosowaniu rezystorów. Czujnik odbiciowy Działa na tej zasadzie że promienie podczerwone odbijają się od przeszkody i wracają do odbiornika który wysyła sygnał do (uc).więcej mozna poczytać tutaj. LCD Tu znajduje się wyświetlacz LCD 2x16 z rezystorem i potencjometrem. Dlaczego nie wyznaczyłem odpowiednich gniazd pod uc. Odpowiedż znajduje się niżej. inne Edubot może także służyć jako płytka testowa do uc, więc powstały 3 ułatwiające życie moduły linijka led, dipswitch i klawiatura na 8-miu przyciskach. Miałem go budować w ferie które zaczynają się jutro ale w związku z konkursem przyśpieszyłem prace. Nie jestem bezbłędny więc coś mogło umknąć mojej uwadze więc w razie błędów pisać od razu, PCB będzie testowane w ferie teraz nie mam czasu i tak cudem się wyrobiłem. Robot jest bardzo rozwojowy więc planuje do niego dodać: - dalmierz ultradźwiękowy - Czujnik RGB (potrzebuje informacji na ten temat) - wieżyczkę na serwie -przejściówkę USB do bootloaderów Mile widziane są też wasze pomysły na dodatkowe moduły. _proj Płytki rozwojowe1.rar
-
[Dla początkujących] Diodik - wielozadaniowy robot dla początkujących
Bogus1 odpisał w temacie użytkownika mskojon • Artykuły użytkowników
Można użyć płytek uniwersalnych (też się lutuje). Można też użyć płytek stykowych (nie lutuje się), ale to nie ma sensu. -
Torby/plecaki to zły pomysł, bo za dobry plecak trzeba zapłacić, chyba że będą zamawiane jak koszulki, tylko czy jakaś firma robi takie rzeczy. Naszywki bardzo dobry pomysł. Co do koszulek, mogły by być z robotami z tego forum, tylko z ładnie zapakowanymi np. skarabeusz, inferno, nie może to być jakaś plątanina kabli w której mało kto widzi robota.
-
Mam problem z wydrukowaniem kilku płytek na jednej stronie. Tak, szukałem w google i na elektrodzie. Udało mi się zrobić pdf wszystkich płytek i teraz trzeba je posklejać na jednej stronie przy pomocy programu graficznego tylko jakiego?? Próbowałem w gimpie i corelu oba nie otwierają pdf. Znacie jakieś programy którymi otworze pdf???? Jeśli to nie jest dobry dział to przenieście temat.
-
A po co/dlaczego ma tam iść.
-
Dlatego wg mnie lepsze jest technikum, bo w liceum będę całą noc kuł z powyższych przedmiotów, żeby tego nie wykorzystać w praktyce. I tak do matury zdążę wszystko zapomnieć, więc jest to uczenie się po to by zapomnieć wg mnie jest to strata czasu. Akurat chemia przydaje się w elektronice 😉 .
-
Co znaczy renomowane liceum/technikum???? Jest to pojęcie względne, ale od czego są rankingi Które miejsce w województwie ma wasze technikum liceum??? Z prawej strony są mapki.
-
nie chce mi się pisać tego 2 razy Technikum elektroniczne/mechatroniczne trwa 4 lata Z tego co się dowiedziałem to wszyscy pracodawcy wymagają doświadczenia zawodowego od świeżo upieczonych inżynierów. Te doświadczenie studiując dziennie można zdobyć po przez pracowanie w zawodzie przez wakacje, albo pracując w domu (projektowanie itp.). Niestety tam po liceum cię nie zatrudnią. Fachowiec jest to osoba, która popełniła wszystkie możliwe błędny i wyciągnęła z nich wnioski Nie pracując w zawodzie nie popełnisz tych błędów. Z tego co wyczytałem na stronach szkół są koła pozalekcyjne na których uczniowie pod nadzorem nauczycieli budują co chcą. Fajniej jest pracować w grupie, niż siedzieć samemu. Tu akurat trzeba samemu coś budować i po jakimś czasie będzie się wszystko umiało.
-
Mały robot mobilny z podzespołów drukarki atramentowej posiadający sensorykę i elektronikę
Bogus1 odpisał w temacie użytkownika elmagico11 • Zupełnie zieloni
Ja też chętnie zerknę. Patrze się tak na drukarkę i chyba czas na emeryturę, albo raczej na eutanazje 😅. Można by z niej zrobić coś ciekawego. -
Można też nimi poprawiać stare ledwo widoczne linie, co jest bardziej realne do zrobienia.
-
Ja wziąłem schemat i obliczenia z asystenta elektronika. Trochę cienko u mnie z angielskim, czy dobrze wyczytałem że: Astable to tryb astabilny sqarewave astable duty cycle = 50% to znaczy o wypełnieniu 50% Jeśli dobrze wyczytałem to dlaczego nie mogę tego włączyć.
-
zmontowany wg. tego schematu: Częstotliwość pokazuje bardzo różną 0,5Hz, 3KHz, 300Hz, 100Hz Może to wina Chińskiego miernika chociaż w to wątpię bo w gniazdku pokazywał 49,99Hz. Jeszcze jedna dziwna rzecz miernik wykrywa napięcie sieciowe np. jak się go przyłoży do gniazdka to świeci i wibruje. Układ podłączam do 5V i jedną ręką trzymam sondę przy diodzie a drugą łapie miernik, a on zaczyna świecić i wibrować. Działam jak antena? Czy jestem podłączony pod napięcie sieciowe? W to drugie wątpię, bo jak łapię żarówkę zębami to nie świeci 🤣
-
Ne555 nie da się tylko zaprogramować 😉 KD93 robiłeś takie coś na stykówce nie było żadnych problemów z pomiarami, bo jak ja sprawdzam częstotliwość to za każdy razem jest inna, z pojemnością to samo. Jak wyciągnę kondensator i go sprawdzę to pomiar jest dobry. Tata twierdzi że ze stykami jest coś nie tak, tej płytki zbyt często nie używałem.
-
Można dawać odbiorniki o różnych częstotliwościach odbioru (w AVT znalazłem na 5 o różnych częstotliwościach). Może jutro skończę prototyp takiego czujnika na ne555. Znacie jakiś kalkulator do ne555 ten na wortalu majsterkowicza coś nie tak działa.
-
Potrzebny czujnik odbiciowy o odległości działania około 10cm
Bogus1 odpisał w temacie użytkownika matrix • Elektronika
Zamiast attiny dałem ne555 w trybie a stabilnym schemat i obliczenia wziełem z tej strony Zamiast Rb dałem potencjometr i nim dobiorę odpowiednią częstotliwość.