sam.podolsky
-
Zawartość
73 -
Rejestracja
-
Ostatnio
-
Wygrane dni
7
Osiągnięcia użytkownika sam.podolsky
")





-
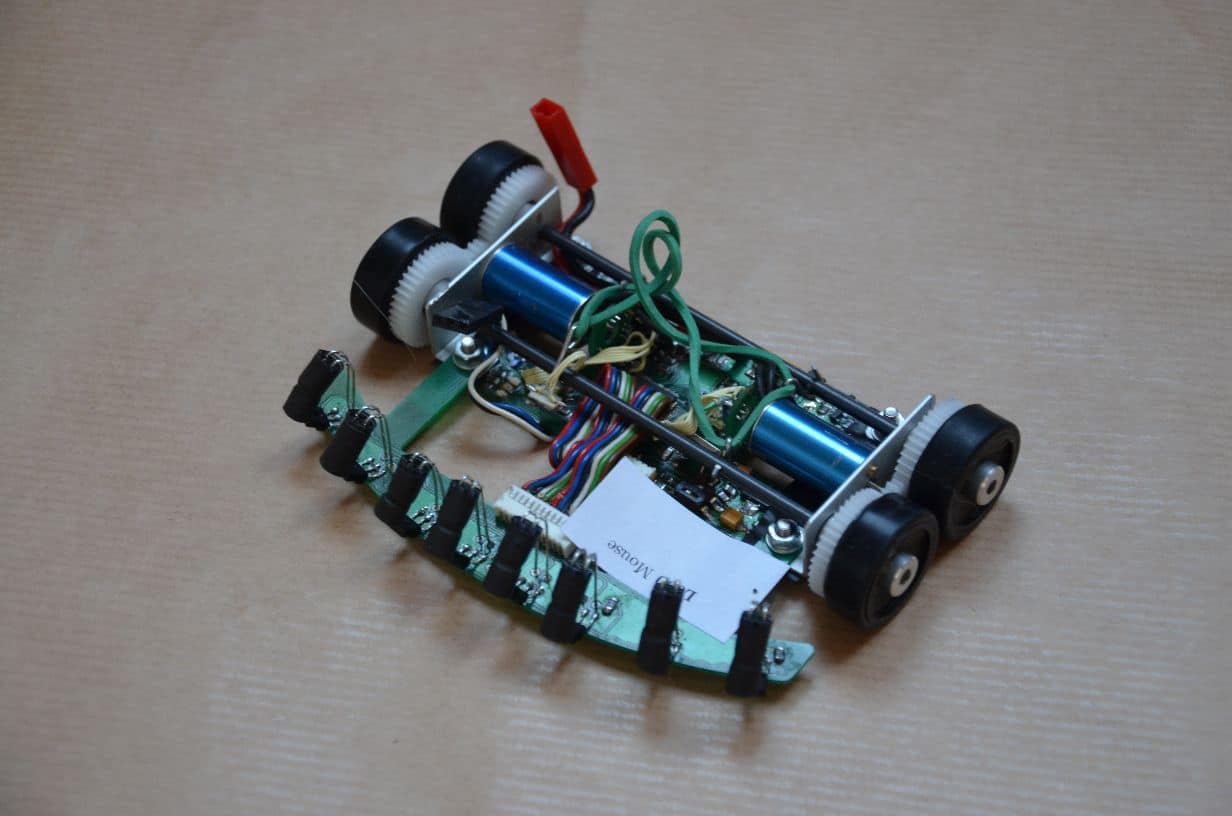
Projekt został wykonany wspólnie z Damianem Łukawskim, Adamem Mołoniewiczem i Łukaszem Rojkiem. Wspaniali inżynierowie z ogromną wiedzą i masą pomysłów. W ramach całego przedsięwzięcia stworzyliśmy 4 roboty. Tutaj prezentujemy Mouse. Podwozie wykonane z laminatu 1 mm które jest również PCB robota. Napęd zrealizowano w oparciu o małe silniki bezszczotkowe z doczepionymi sensorami Halla. Silniki zaczepiono na kątowniku Alu, do którego zamocowano przekładnie wraz z 4 kołami. Całość sterowana przez STM32F207. Hardware i soft regli bldc wykonany we własnym zakresie na STM32. Czujniki linii: dioda nadawcza TSAL5100 oraz odbiornik TSL262R. Cały robocik zasilany z pakiety LiPol 1S 4.2 V dającego 13.5 A ciągłego prądu ważącego 11 g wraz z kablami i mocowaniem. Prędkość maksymalna 12.5 m/s przy zasilaniu 4.2 V (ze względu na inne przełożenie niż w Rabbit). Robot waży niecałe 90 g.
-
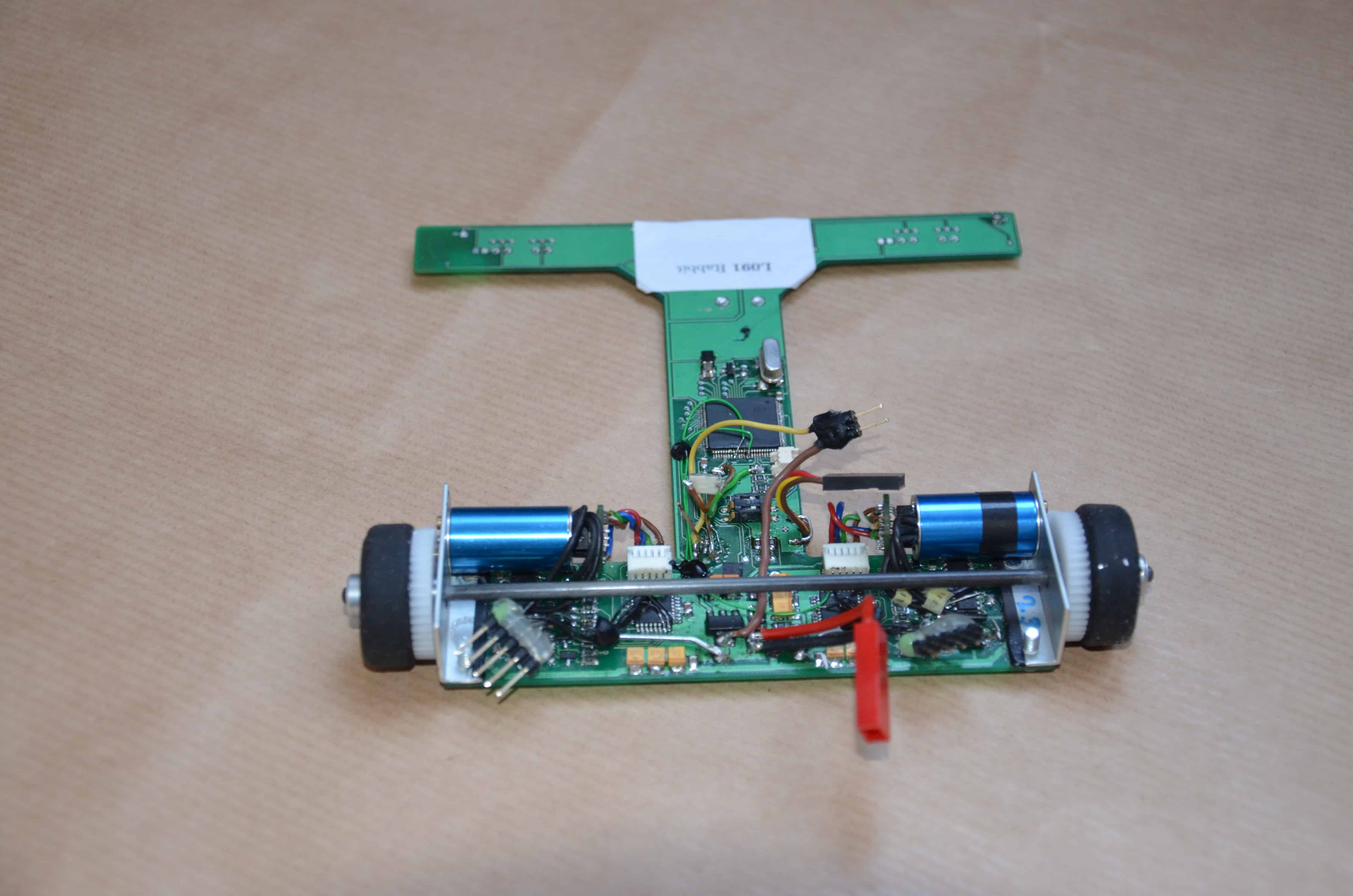
Projekt został wykonany wspólnie z Damianem Łukawskim, Adamem Mołoniewiczem i Łukaszem Rojkiem. Wspaniali inżynierowie z ogromną wiedzą i masą pomysłów. W ramach całego przedsięwzięcia stworzyliśmy 4 roboty. Tutaj prezentujemy Rabbita. Podwozie wykonane z laminatu 1 mm które jest również PCB robota. Napęd zrealizowano w oparciu o małe silniki bezszczotkowe z doczepionymi sensorami Halla. Silniki zaczepiono na kątowniku Alu, do którego zamocowano przekładnie wraz z kołami. Całość sterowana przez STM32F103. Hardware i soft regli bldc wykonany we własnym zakresie na Atmega8 w Assemblerze. Prędkość maksymalna 14 m/s przy zasilaniu 4.2 V. Robot waży 75 g.

-
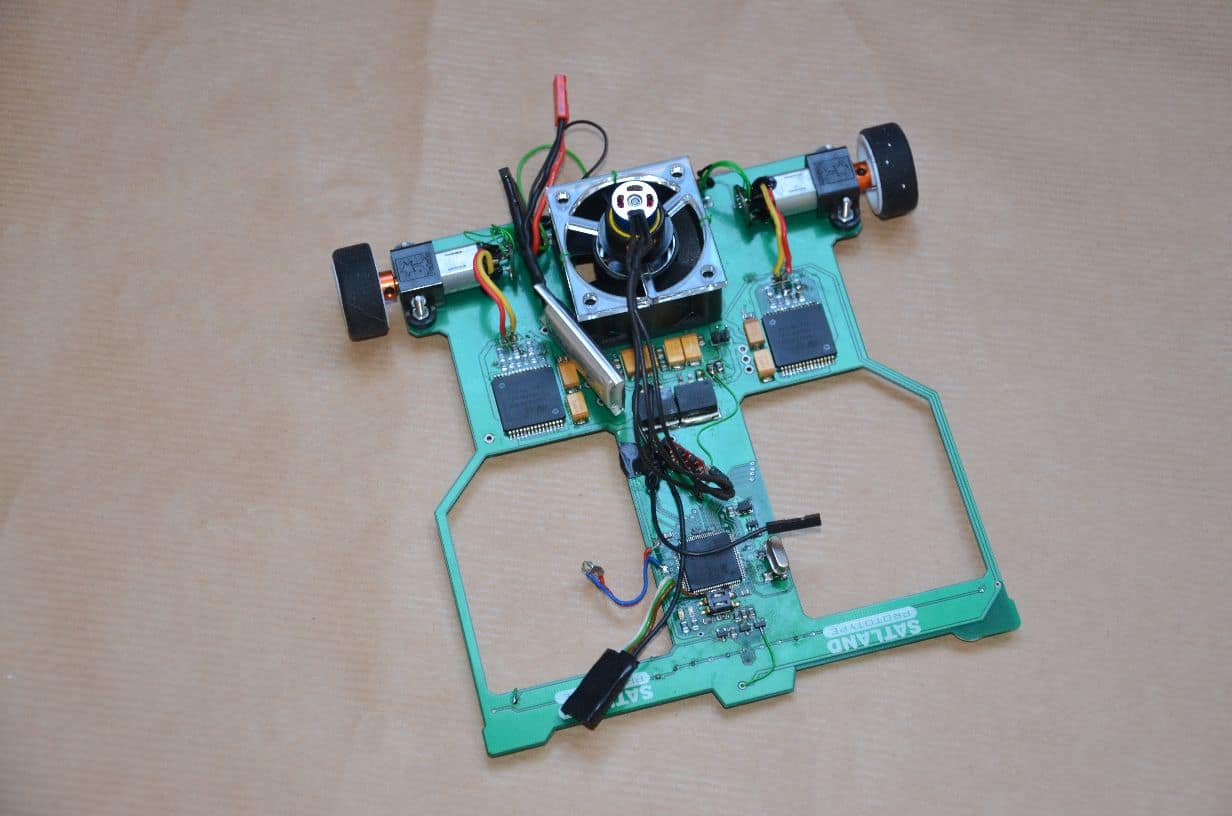
Projekt został wykonany wspólnie z Damianem Łukawskim, Adamem Mołoniewiczem i Łukaszem Rojkiem. Wspaniali inżynierowie z ogromną wiedzą i masą pomysłów. W ramach całego przedsięwzięcia stworzyliśmy 4 roboty. Tutaj prezentujemy pierwszego z nich. Konstrukcja wykonana na laminacie 1 mm który jest również PCB robota. Napęd zrealizowano w oparciu o silniki Pololu HP 10:1 z enkoderami (3 czujniki Halla plus magnes 3 mm na tylnej osi silnika, 6 pulsów na obrót silnika). Zastosowano analogowe czujniki linii, STM32F103 oraz DIY turbinę. Kółka i opony od Mini-Z zamocowane za pomocą adaptera. Przednie ślizgacze wykonane z teflonu. Sterowanie kaskadowe: na silniki wystawiana jest liczba obrotów koła utrzymywana przez oddzielny regulator.

-
[Line follower] Snail - worklog
sam.podolsky odpisał w temacie użytkownika sam.podolsky • Projekty - DIY w budowie (worklogi)
Prędkość maksymalna na prostej 50 km/h. -
Kupię turbinę EDF 27 bądź EDF 30. Sprawa raczej pilna. Pozdrawiam, Sławek Chełmiński
-
[Linefollower] Test
sam.podolsky odpisał w temacie użytkownika sam.podolsky • Projekty - DIY w budowie (worklogi)
Nic nie pilowalem. Zdjalem sciagaczem do zebatek jedna zebatka i nalozylem druga. -
[Linefollower] Test
sam.podolsky odpisał w temacie użytkownika sam.podolsky • Projekty - DIY w budowie (worklogi)
Przelozylem zebatki na wale silnika - troche klopot ale da rade. -
My używamy 🙂
-
Klasyfikacja konstruktorów - nowy pomysł
sam.podolsky odpisał w temacie użytkownika Treker • Dyskusje o FORBOT.pl
Świetny pomysł Damian! Uważam, iż klasyfikacja październik - czerwiec jest jak najbardziej trafna. Tak też chyba nieformalnie układa się kalendarz zwodów / sezon. By dobry konstruktor nie miał źle 🙂 wystarczy chyba wprowadzić spore różnice pomiędzy pkt. za kolejne miejsca. -
[Line follower] Snail - worklog
sam.podolsky odpisał w temacie użytkownika sam.podolsky • Projekty - DIY w budowie (worklogi)
Wybrane silniki mają 3 różne średnice i rozstawy montażowe, przekładnia pasowała do jednego z nich, mocowanie na śrubki z przekładni. Wymiary przekładni chyba znajdziesz w datasheetcie. Nic nie mogę pomierzyć gdyż silniki są na razie u przyjaciół na testach. Zębatka zamawiana w KKPMO. Zębatka atakująca w silniku oryginalnie zamontowanym w przekładni nie pasuje gdyż jest na wał 2.3 mm a w nowym silniku jest 2.0 mm. Na razie uruchomiliśmy je na sterowniku bez sensorów i wyniki są bardzo obiecujące. -
[Line follower] Snail - worklog
sam.podolsky odpisał w temacie użytkownika sam.podolsky • Projekty - DIY w budowie (worklogi)
Zębatki robiłem w KKPMO - super jakość, przekładnie kupiłem z silnikami L149 z Allegro. Przełożenie 10:1. -
Prace nad nowym LF ciągle trwają. Chcemy przedstawić kilka elementów nad którymi pracujemy. Czujnik linii TSL1410R z firmy Taos - matryca fotoczułych elementów dość gęsto rozmieszczonych. Niestety jest dość czuła - zostanie osłonięta od otoczenia. Oświetlana będzie emiterem podczerwieni VSMG2720-GS08. Dokumentacja Taos Dokumentacja emiter Czujnik linii - daleki Dużym plusem byłaby znajomość trasy z wyprzedzeniem. Może uda się to zrealizować w oparciu o czujniki wykorzystywane w Micromouse do pomiaru odległości. Emiter (TSAL5100) wysterowywany przez matrycę ULN2003 oświetla trasę i odbite światlo pada na odbiornik - konwerter światło - napięcie TSL262R. Dokumentacja TSL262R Dokumentacja TSAL5100 Zasilanie Mniejszego pakietu już nie udało mi się znaleźć. Dwa ogniwa Dualsky 7.4 V Li-Pol o wydajności prądowej 3 A ciągłej oraz 4.5 A chwilowej o pojemności 150 mAh i wadze 9.5 g 😃. By nie uszkodzić pakietów robot będzie wyposażony w pomiar prądu - rezystor SMD o rezystancji 5 mOhm plus wzmacniacz LM358 i dalej sygnał na ADC w uC. Silnik wraz z enkoderem Pololu HP 10:1 z tylną osią i nałożonym magnesem neodymowym. Odczyt pozycji poprzez układ AS5040. Zakupiłem silniki HP 30:1 z tylną osią oraz HP 10:1 zwykłe po czym przełożyłem zębatki. Śmiga jak bum cyk cyk. Kółka zapożyczone od Mini-Z. Mocowanie do silników Pololu poprzez piastę 3mm. Opony Atomic AR-264 (gładkie, na szerszą felgę, twardość 10). Pełne dwa napędy (silniki, mocowania, felgi, opony, magnesy) oraz zasilanie ważą łącznie 39.5 g. Zatem może się uda zamknąć wagę całej konstrukcji poniżej 65 g.
-
[Line follower] Snail - worklog
sam.podolsky odpisał w temacie użytkownika sam.podolsky • Projekty - DIY w budowie (worklogi)
Na zdjęciach tego nie ma ale ten robot ma enkodery Avago. -
Freestyle Pojazd do inspekcji kanalizacji
sam.podolsky odpisał w temacie użytkownika sam.podolsky • Projekty - DIY roboty
Robot bez żadnego problemu może się obracać. W porównaniu do tego co widać na zdjęciach może być o połowę krótszy. Zgadzam się. Niestety projekt został na razie zakończony z przyczyn finansowych. -
[Line follower] Snail - worklog
sam.podolsky odpisał w temacie użytkownika sam.podolsky • Projekty - DIY w budowie (worklogi)
Chciałbym aby uC mógł z łatwością operować na floatach. W przypadku ATmeg jest to udręka. Znając umiejętności Damiana algorytm również może wymagać szybszego zegara. Dodatkowo uC będzie komunikować się przez I2C ze sterownikami silników, dokonywać odczytu min. 16 ADC (czujniki, żyroskop, akcelerometr), przez SPI i dalej bezprzewodowo z centralą, etc. Do tej pory kody Etiopczyków działały <2ms z pełnym odczytem 8 czujników i obliczeniem PD. Fajnie jakby nowy algorytm obracał poniżej 0.5 ms.