rusin
-
Zawartość
5 -
Rejestracja
-
Ostatnio
-
Wygrane dni
4
Osiągnięcia użytkownika rusin
")





-
[Zawody] Konferencja naukowa podczas ROBO~motion 2017
rusin odpisał w temacie użytkownika grip_rz • Zawody/Konkursy/Wydarzenia
Ze swojej strony bardzo chętnie. Najlepiej, jakby odbyła się następnego dnia. Poza plusami organizacyjnymi (mniejsze "upchnięcie" wszystkiego), byłaby to dobra okazja do integracji. -
Freestyle Pomidor 1.5 robot typu Ketchup House
rusin odpisał w temacie użytkownika rusin • Projekty - DIY roboty
Tak, zapamiętuje. Ale o tym już więcej będzie następnym razem. 🙂 -
Freestyle Pomidor 1.5 robot typu Ketchup House
rusin odpisał w temacie użytkownika rusin • Projekty - DIY roboty
Tak, oczywiście że można. W pierwszej wersji naszego robota zakładaliśmy że będziemy zbierać 3 puszki na raz. -
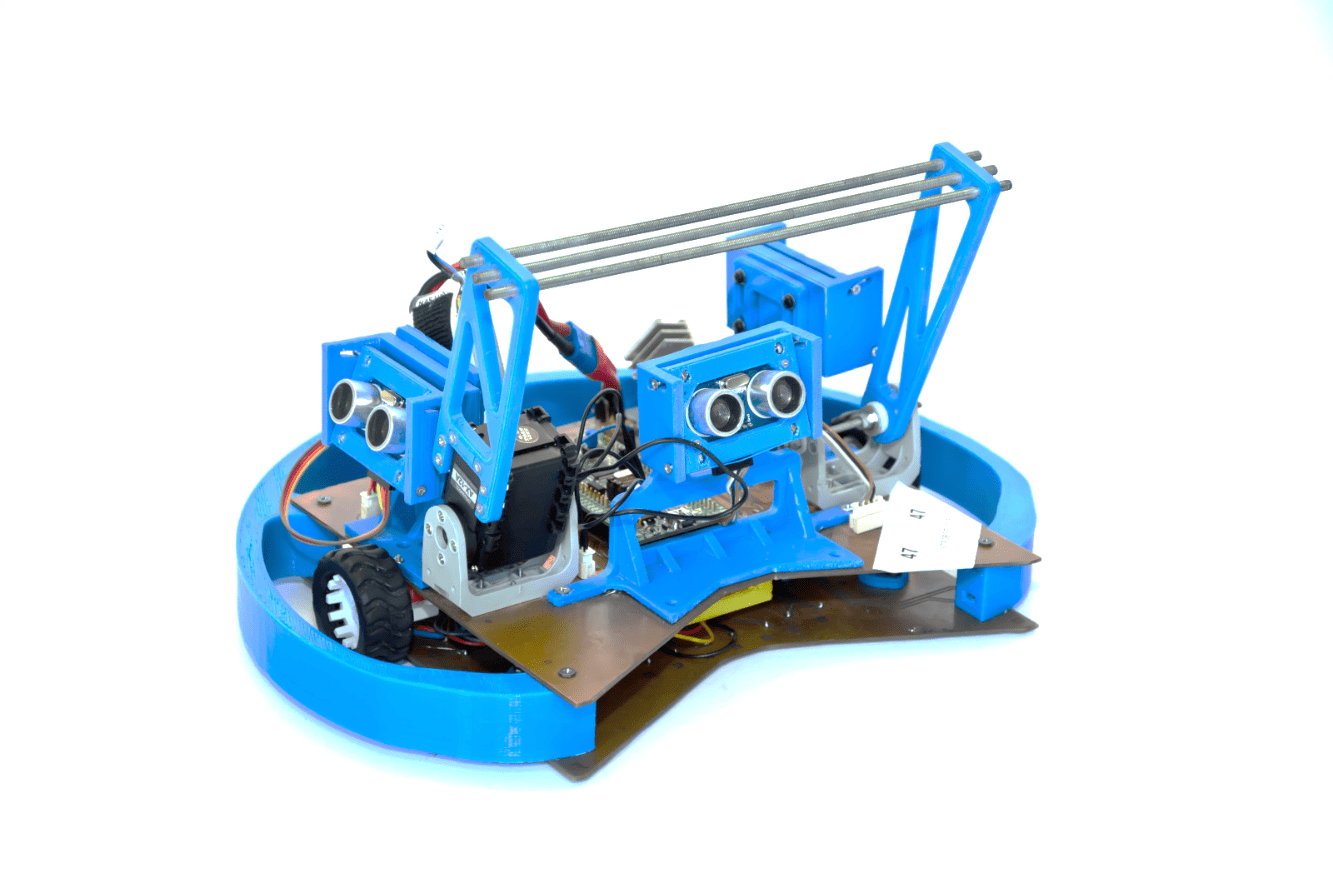
Idąc za ciosem, tym razem chciałem przedstawić (najprawdopodobniej) pierwszego na tym forum robota klasy Ketchup House. W pracach nad jego stworzeniem brało udział 5 członków Koła Naukowego Robotyków. Nazwa Nazwa Pomidor wydaje się być dość zrozumiała z uwagi na nazwę konkurencji w której startuje, jednak numeracja już niekoniecznie 🙂 Otóż bezpośrednim protoplastą tego robota jest robot Pomidor (1). Robot miał parę błędów konstrukcyjnych, które powodowały, że nie spisywał się najlepiej. W związku z tym podjęliśmy decyzję o zrobieniu dużo bardziej zaawansowanego robota – Pomidora 2. Jednak na jakiś czas przed zawodami stwierdziliśmy, że nie zdążymy wykonać go w wymarzonej przez nas formie, więc powstał robot będący hybrydą tych dwóch podejść – Pomidor 1.5. Konstrukcja okazała się na tyle udana, że na jej podstawie powstała kolejna generacja robota – Pomidor 1.6 (o której będzie zapewne w kolejnym poście). Zawody Ketchup House Ponieważ jest to dość egzotyczna kategoria (przynajmniej w Polsce), pozwolę sobie ją najpierw krótko opisać. Moim zdaniem, Ketchup House jest zdecydowanie najbardziej nieprzewidywalną i widowiskową konkurencją odbywającą się na zawodach konstruktorskich. W każdej, trwającej 3 minuty rozgrywce udział biorą 2 roboty. Polem ich zmagań jest biała, kwadratowa plansza o wymiarach min. 1,8x1,8m. Na planszy znajduje się 10 czarnych linii (5 poziomych i 5 pionowych) o szerokości 12mm, tworząc kwadrat o wymiarach 1,2x1,2m, podzielony na 16 mniejszych kwadratów o wymiarach 0,3x0,3m. Na skrzyżowaniach umieszczane są puszki z tytułowym keczupem. Są to typowe stalowe puszki o średnicy 53 mm, wysokości 74 mm i masie ok. 163 g. W każdej, trwającej 3 minuty potyczce biorą udział 2 roboty. Ich zadaniem jest przemieszczenie puszek na swoją linię „domową”. Na początku rozgrywki na planszy znajduje się 5 puszek. 2 z nich, zaznaczone na zielono, znajdują się w ustalonych pozycjach (skrzyżowania C2 oraz C4). Położenie 3 pozostałych puszek jest losowane tuż przed rozpoczęciem pojedynku. Aby zrównoważyć szanse robotów na zwycięstwo, każda z dolosowywanych puszek musi się znaleźć na innej z linii B, C, D. Na początku pojedynku roboty są umieszczane w pozycjach A3 oraz E3. Na znak sędziego roboty są uruchamiane. Od tej pory, aż do zakończenia pojedynku nie ma możliwości ingerencji w ich działanie. Jeżeli podczas rozgrywki robot poruszy jedną z puszek w wylosowanej pozycji, to na jej miejsce dostawiana jest kolejna. Dostawienie następuje po przejechaniu przez robota do następnego skrzyżowania. W trakcie jednego pojedynku na planszy może się pojawić łącznie do 12 puszek. Istnieje zupełna dowolność w sposobie przemieszczania i odstawiania puszek. Nie ma także ograniczeń co do sposobu poruszania się po planszy – roboty mogą poruszać się po wyznaczonych liniach, ale nie muszą. Przypadkowe zderzenia na ogół nie są karane, jednak niezgodne z zasadami jest zamierzone „dążenie do zderzenia” (np. wypychanie poza planszę). Roboty powinny wykrywać i omijać przeciwnika. Po upływie 3 minut następuje zakończenie potyczki. Roboty (jeżeli zachodzi taka potrzeba) są zatrzymywane. Za każdą puszkę dotykającą linii bazowej przyznawany jest 1 punkt. (Na rysunku poniżej przykładowa sytuacja na koniec pojedynku, zakończona wynikiem 5-4 na korzyść robota 2 (niebieskiego)). Mechanika Po tym dość przydługim wstępie, teraz parę słów o samej konstrukcji. Bazę robota stanowią dwie płyty laminatu szklano-epoksydowego. Obie płytki stanowią dwojaką rolę - po pierwsze są to bazowe komponenty, do których montowane są wszystkie pozostałe części, po drugie zaś - rozmieszczone są na nich wszystkie połączenia elektryczne. Obie płyty mają kształt prostokąta o wymiarach 200x190 mm, w którym wycięto V-kształtne wycięcie. Płyty są ze sobą skręcone za pomocą mosiężnych dystansów. Układ napędowy stanowią dwa silniki POLOLU z przekładnią 298:1. Wcześniej stosowaliśmy silniki o dużo mniejszym przełożeniu, jednak podczas naszych pierwszych zawodów okazało się, że jazda ze zbyt dużą prędkością jest nieopłacalna – podczas zderzeń sędzia zawsze uznawał, że to nasza wina, gdyż jechaliśmy z dużo wyższą prędkością (poza tym zastosowanie tak dużego przełożenia pozwoliło nam na uzyskanie większej dokładności enkoderów). Koła podporowe (Kastora) oraz koła napędowe także pochodzą od POLOLU – zostały wybrane głównie ze względu na odpowiedni rozmiar. Do unieruchamiania puszki wykorzystujemy ramkę napędzaną serwomechanizmem. Aby mieć możliwość dokładnego sterowania oraz monitoringu siły, zdecydowaliśmy się na Dynamixela AX-12A (duży wpływ na to miał także fakt, że akurat taki posiadaliśmy w schedzie po starszym projekcie 🙂 ) Na zawodach zaobserwowaliśmy, że ze względu na wystające kółka czasami robotowi zdarza się zakleszczyć (np. o puszkę) aby uniknąć takich sytuacji wydrukowaliśmy osłonę okalającą całego robota. Elektronika Schemat ideowy całego układu elektronicznego można zobaczyć na rysunku poniżej: Mózgiem robota jest STM32F100RB, będący częścią zestawu STM32 Discovery VL. Zdecydowaliśmy się na takie rozwiązanie, aby móc podczas zawodów zmieniać szybko algorytm pomiędzy potyczkami i mieć możliwość jego szybkiego wymienienia w razie awarii. Jak można zaobserwować na rysunku robot jest wyposażony w dużą ilość czujników. Zdecydowanie najważniejszymi z punktu widzenia algorytmu sterowania są czujniki odbiciowe. Jest ich aż 17 (na dolnej płytce) ich rozmieszczenie można zaobserwować na rys. poniżej. Aby móc dopasowywać się do różnych plansz, układ wyposażono w komparatory oraz potencjometr, które pozwalają na ustawienie poziomu, od którego wykrywana jest czerń. KTiRy można przyporządkować do 3 grup. Czujniki oznaczone numerami 4-11, znajdujące się w przedniej części robota, są wykorzystywane w algorytmie jako źródło danych regulatora sterującego jazdą po prostych, a także (w mniejszym stopniu) do wspomagania obrotu. Czujniki w przednich rogach płytki (odpowiednio 11 i 12 oraz 13 i 14) były wykorzystywane przy dowożeniu puszek - do dokładnego pozycjonowania puszek na linii oraz jako czujniki awaryjne podczas jazdy po prostej. Transoptory po bokach (15, 16 i 17 oraz 18, 19 i 20) umożliwiają wykrycie dojazdu do skrzyżowania oraz są głównymi sensorami wykorzystywanymi w algorytmie obrotu. W toku testowania okazało się, że bardzo przydatne byłyby dodatkowe czujniki, które umożliwiłyby jazdę po linii do tyłu. Aby nie wytrawiać całej płytki od nowa, wykonano dodatkową tylną płytkę, na której znajdują się 3 czujniki (o numerach 1-3) Kolejnymi ważnymi czujnikami były enkodery. Na początku stosowaliśmy enkodery optoelektryczne, które do poprawnego działania wymagały zastosowania komparatorów oraz przejścia żmudnego procesu kalibracji (dla każdego z KTiRów z osobna dobieraliśmy nastawy potencjometru). Jednak gdy tylko pojawiły się enkodery magnetyczne dla silników POLOLU, nasze problemy odeszły do lamusa. (Dla porównania – sygnał z enkoderów optoelektrycznych oraz z magnetycznych) Poza tym stosowaliśmy czujniki odległości – do wykrywania puszki oraz do wykrywania przeciwników na planszy. Aby uniknąć cross-talku do jednego zadania wykorzystaliśmy analogowe czujniki SHARP (4-30) a do drugiego czujniki ultradźwiękowe. Aby ustawić odpowiedni kąt czujników ultradźwiękowych – tak, aby wykrywały jedynie przeciwnika, a nie puszkę, zaprojektowaliśmy specjalne mocowanie, umożliwiające modyfikację ich kąta nachylenia. Dla ciekawskich, poniżej są schematy: Na koniec, tradycyjnie, krótki filmik pokazujący działanie robota: [ Dodano: 28-03-2016, 22:01 ] Nie chcąc przedłużać i tak przydługiego już posta, o algorytmie będzie nieco więcej przy okazji opisu robota Pomidor 1.6.
-
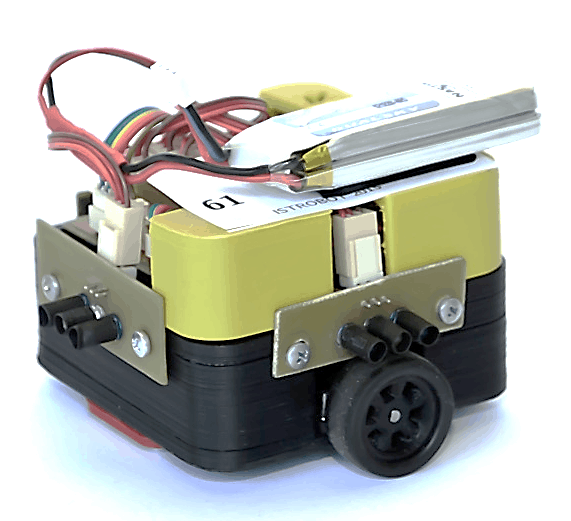
Cześć, Jestem z Koła Naukowego Robotyków z Politechniki Warszawskiej. Niedawno stwierdziliśmy, że w sumie fajnie by było opisać gdzieś nasze konstrukcje. Jako, że zdarza nam się korzystać z zasilaczy z czarnej listy, padło na forbota 😃 . Na pierwszy ogień chcieliśmy wypuścić jedną ze starszych maszyn – Minotaura. Jego historia była dość ciekawa – na 3 tygodnie przed ubiegłorocznymi zawodami Robomaticon razem z kolegą stwierdziliśmy, że może fajnie byłoby wystawić tam jakiegoś Micromouse’a. Postawiliśmy zatem na jak najprostsze rozwiązania, które z jednej strony pozwoliłyby nam przetestować różne algorytmy jazdy, z drugiej zaś zaoszczędziłyby czasu na wykonanie oraz programowanie. Dzięki temu jednak konstrukcja jest dość prosta i może być dobrym projektem dla początkujących robotyków. Mechanika Bazę montażową dla całego robota stanowi obudowa wydrukowana na drukarce 3D. Pierwsza wersja zakładała, że podstawa robota będzie rozpostarta na kwadracie o długości 110 mm o zaokrąglonych narożach. Po wykonaniu prototypu oraz pierwszych testach bardzo szybko okazało się jednak, że robot jest zdecydowanie za duży. Z uwagi na to, że możliwe okazało się zmniejszenie odległości pomiędzy silnikami bez uszczerbku na działaniu enkoderów magnetycznych, zdecydowano się znacznie ograniczyć wymiary robota. Kolejna (ostateczna) wersja robota miała już w podstawie kwadrat o boku 80 mm. Aby móc ograniczyć wymiary, zdecydowano się na węższe ścianki boczne. Z uwagi na dużą łamliwość, zrezygnowano z drukowanych mocowań do płytek z elektroniką i zastąpiono je gotowymi, plastikowymi dystansami. Ostateczny wynik można oglądać na zdjęciu poniżej: W robocie Minotaur zdecydowano się na zastosowanie silników POLOLU z metalową mikroprzekładnią 50:1 z obustronnym wałem. Pozwoliło to na zastosowanie enkoderów magnetycznych tej samej firmy. Na wałach silników zamocowano wykonane metodą druku 3D koła. W pierwszej wersji zastosowano opony odlewane z silikonu, jednak później (ze względu na dość szybkie zużywanie się silikonowych) zdecydowano się na wykorzystanie opon Kyosho Mini-Z. Pozwoliło to zminimalizować poślizgi. Dodatkowymi elementami są elementy podporowe, oklejone taśmą teflonową oraz górna pokrywa robota, do której jest mocowana bateria. Elektronika Ze względu na małe zasoby czasowe oraz dostępność części w laboratorium elektronika robota Minotaur została oparta na Arduino Uno. Prawie cała pozostała elektronika (z wyjątkiem sensorów) została umiejscowiona na shieldzie wpinanym w Arduino. Poza wspomnianymi wcześniej silnikami z enkoderami, zastosowano jedynie kilka komponentów. mostki TB6612FNG, które (ze względu na przykre doświadczenia w poprzednich konstrukcjach) zastosowano po jednym dla każdego silnika (zwarto wyprowadzenia). Za interfejs użytkownika służyły 1 przycisk oraz 1 dioda. Poza tym za pomocą dzielnika napięcia monitorowano stan baterii. Aby poprawić jazdę, zdecydowano się na zastosowanie czujnika IMU (Pololu Mini-IMU 9), który znaleźliśmy w laboratorium. Jednak, nawet przy wyłączonym żyroskopie robot radził sobie w labiryncie. Wypinany moduł Bluetooth służył głównie do doboru nastaw podczas programowania (obecnie nie jest on wykorzystywany). W robotach zastosowano czujniki odległości stworzone z 2 diód IR oraz fototranzystora. Światło emitowane przez diodę IR odbija się od ściany labiryntu i wraca do fototranzystora. Zastosowano jedynie 3 takie czujniki, umiejscowione na środku ścian robota. Jeden z nich ma za zadanie sprawdzać, czy ściana jest na wprost. Pozostałe 2 umiejscowione na bokach sprawdzają, czy ścianka istnieje z boku. Pozwalają także robotowi utrzymać stałą odległość pomiędzy ściankami. Innym ich wykorzystaniem jest snapowanie – jeżeli robot ma mały błąd kątowy (liczony na bieżąco), to w momencie gdy jakaś ścianka mu się kończy, aktualizuje swoje położenie. Algorytm Podobnie jak w większości konstrukcji, które nie poruszają się metodą prawej/lewej dłoni, w robocie został zaimplementowany algorytm „flood fill” - zalewania wodą (Bellmana - Forda). Naszą jedyną modyfikacją, była preferencja jazdy prosto (obrót jest dla nas bardziej kosztowny). Aby nie zmuszać bardziej zaawansowanych czytelników do przewijania, początkujących odsyłam do linku: [LINK] Aby móc choć nieco przystosować się do warunków zmiennego oświetlenia, na początku każdego przejazdu dokonujemy kalibracji. Aby robot mógł swobodnie poruszać się po labiryncie powinien on potrafić wykonywać 2 podstawowe ruchy: jazda do przodu oraz skręt (o 90o w prawo i lewo, obrót o 180o). Przed jazdą powinien on jednak skalibrować czujniki. Do obrotu wykorzystywane są dwa czujniki: enkodery oraz żyroskop. Wiodącym czujnikiem jest żyroskop, z którego po scałkowaniu prędkości otrzymujemy kąt obrotu. Enkodery wykorzystywane są głównie do kontroli prędkości obrotowej kół, aby robot obracał się w miejscu bez zbędnego przemieszczenia (jeśli oba koła kręcą się z ta samą szybkością wówczas robot obraca się wokół swojego środka). Aby zminimalizować szanse kolizji robota ze ścianami labiryntu podczas jazdy wykorzystuje się odczyty z trzech typów czujników: odległości, enkoderów oraz żyroskopu. Każda z tych wartości jest uwzględniana z odpowiednią wagą, która została dobrana w sposób eksperymentalny. Wagi nie są jednak stałe, ale zależne od ułożenia ścianek lub ich braku. Do utrzymywania kierunku wykorzystywane są enkodery oraz żyroskop, natomiast czujniki odległości służą do utrzymywania robota w równych odstępach od bocznych ścianek niwelując niedokładności obrotów. Do jazdy na wprost podobnie jak podczas obrotu wykorzystywany jest regulator PD. Innym ważnym aspektem jest pokonywanie zadanego dystansu, jest to długość pojedynczej komórki. Błędy podczas pomiaru odległości mogą skutkować złym zmapowaniem labiryntu bądź kolizją ze ścianką. Korzystając z faktu, że kształt labiryntu jest znormalizowany możemy bazować robota do punktów charakterystycznych (w tym wypadku jest to początek bądź koniec ścianki). Korzystając z bazowania co pewien czas zerowany jest błąd położenia (np. w miejscach pokazanych na rys. poniżej). I na koniec coś co wszyscy lubią najbardziej, czyli robot w akcji. Niestety nie jest to najnowsze wideo, ale na pewno w najlepszej jakości, czyli przejazd robota podczas zawodów ISTROBOT w Bratysławie.