__ROBI__
-
Zawartość
10 -
Rejestracja
-
Ostatnio
Osiągnięcia użytkownika __ROBI__
")



-
Witajcie, nie znalazłem informacji ( pewnie gdzieś jest ) na temat maksymalnej możliwej odległości kamera -> Pi. Potrzebowałbym zamontować kamerkę w odległości ok 6metrów od Pi i zastanawiam się jak to zrobić, czy w ogóle to możliwe? Zapewne potrzebny będzie inny interfejs?
-
Klawiatura skrótów z Arduino, która ułatwia codzienną pracę
__ROBI__ odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
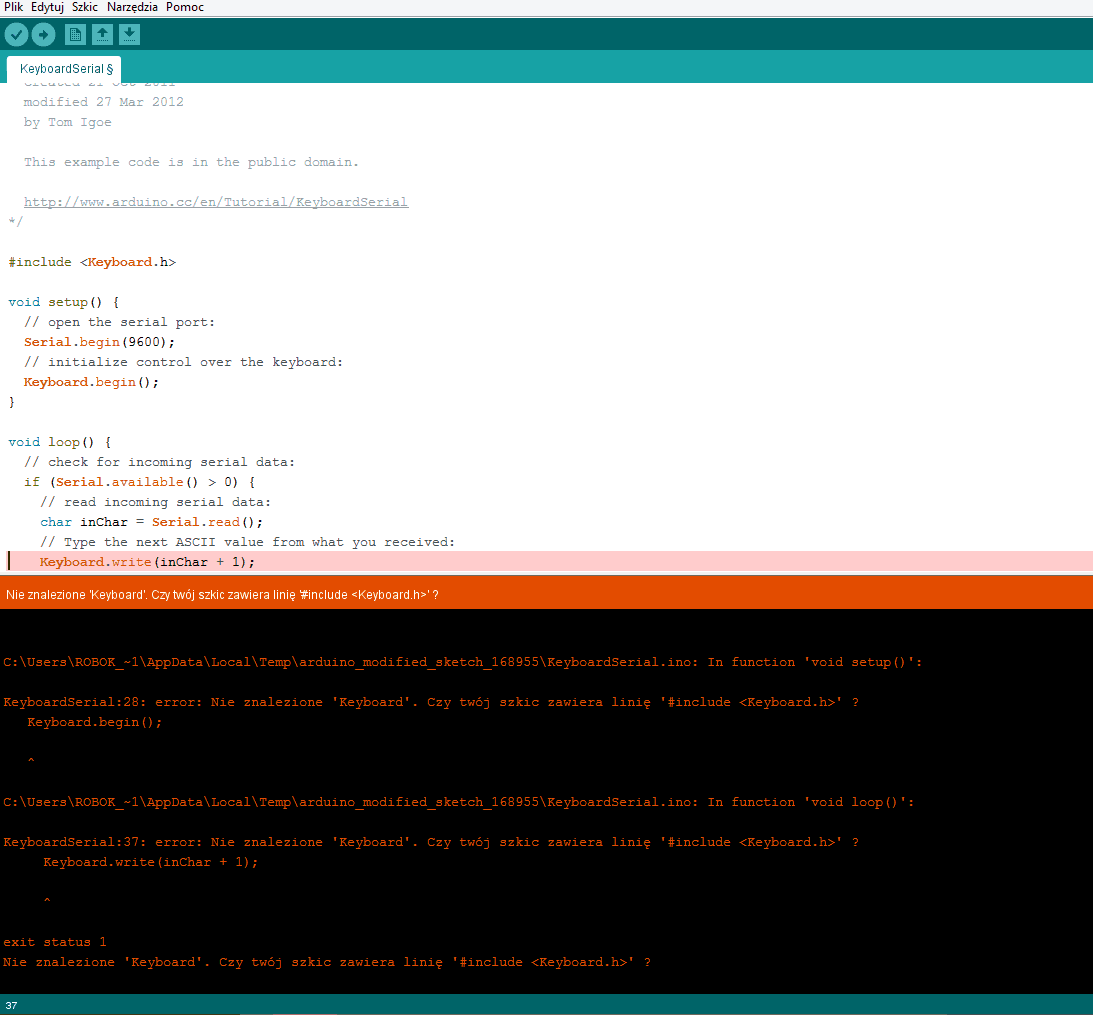
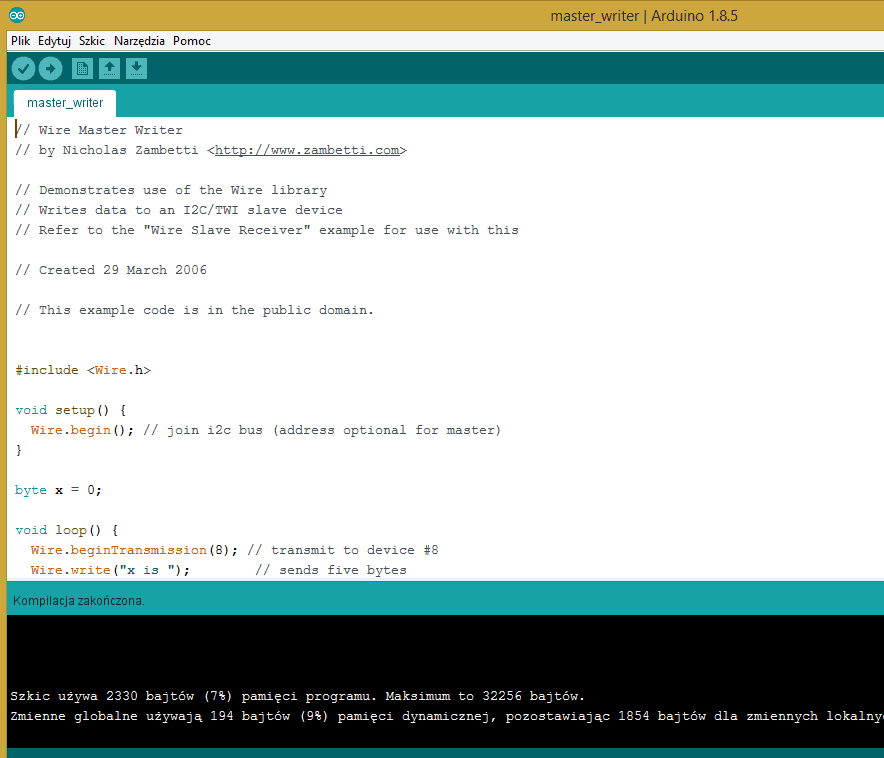
Witajcie, Co może być nie tak z podpięciem biblioteki Keyboard.h , przykład dołączony do zainstalowanej biblioteki: sprawdziłem Wire - działa : Przeinstalowałem więc środowisko, wywaliłem wszystkie zainstalowane wcześniej biblioteki, nic nie pomaga 😞 Co jeszcze powinienem sprawdzić? Biblioteka pochodzi z : https://github.com/arduino-libraries/Keyboard EDIT: Chyba już wiem o co kaman, zdaje się że Keyboard.h działa tylko dla ATmega32u4 lub Micro: z Arduino.cc: "The keyboard functions enable 32u4 or SAMD micro based boards to send keystrokes to an attached computer through their micro’s native USB port." znaczy się moje Uno mogę schować do kieszeni, szkoda 😞
-
Zbuduj kierownicę bolidu F1 z Arduino!
__ROBI__ odpisał w temacie użytkownika Komentator • Wiadomości
i nie potrzeba żadnego programiku po stronie PC? Cała emulacja odbywa się poprzez Serial i wysyłanie odpowiednich kodów? Można by zrobić konsole dla EU07 ( symulator lokomotywy ) 😃 -
Technika cyfrowa - #7 - sterowanie wyświetlaczem 7-seg.
__ROBI__ odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Dzięki za odpowiedź 🙂 trudne ale możliwe? 🙂 Chciałbym wykorzystać coś takiego: spodziewam się że ilość generowanych przez to ustrojstwo impulsów będzie znaczna, uC nie posiada wielowątkowości i na zliczanie zostało by pochłonięte 100% czasu. Wymyśliłem sobie aby zbudować układ logiczny który zliczy ilość impulsów a następnie, po osiągnięciu założonego poziomu, wywoła przerwanie które zostanie obsłużone już po stronie uC. Gdzieś daleko w zamyśle byłoby zbudowanie układu który kontrolowałby prędkość obrotową dwóch silników napędzających koła. w przypadku kiedy ilość impulsów z silnika A <> ilość imp.silnika B wtedy sprawdzamy ile imp. przypada na każdy silnik i odpowiednio modyfikujemy PWM ( zdarzenie w uC ), tak aby faktyczna prędkość obrotowa obu silniczków była bardzo zbliżona. Pewnie można by było zastosować jakiś mini uC który będzie liczył tylko to i podłączyć go szyną do innego "głównego" uC, pewnie tak to się skończy ( w końcu będzie to tylko jeden scalak + kilka kondziów ). Przepraszam jeżeli zawracam głowę, ale problem w tym że mój Profesor zaraził mnie eksperymentowaniem z Techniką Cyfrową 😃 i czasem może mnie trochę ponosi 😃 -
Technika cyfrowa - #7 - sterowanie wyświetlaczem 7-seg.
__ROBI__ odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Zainteresowało mnie wyprowadzenie nr. 5. Rozważam układ który powinien liczyć impulsy z dwóch czujników ( zakładam ilość impulsów "wejściowych- podanych na zegar" = 100 ), następnie jeżeli impulsy już przeliczone przez 4026 ( czyli z wyjścia 5 ) się "zsynchronizują" układ powinien wykonać czynność. wymyśliłem sobie użycie dwóch CD4026 + jednej bramki AND. na razie czysta teoria 🙂 jeszcze bez pomysłu co ma robić i skąd brać impulsy 😃 czy to ma sens? Czy są jakieś inne liczniki umożliwiające generowanie "pika" po osiągnięciu określonej ilości cykli? -
Podanie napięcia 5v na pin 5V w arduino, czy to bezpieczne?
__ROBI__ odpisał w temacie użytkownika __ROBI__ • Elektronika
Dziękuję 🙂 -
Podanie napięcia 5v na pin 5V w arduino, czy to bezpieczne?
__ROBI__ opublikował temat w Elektronika
Dzień dobry Szanowni Forumowicze, Przepraszam jeżeli takie pytanie już było, próbowałem coś znaleźć ale bez skutku. Chodzi o przypadek z modułem sterowania silników ( kupiony od chińczyka ) L293D ( opisany jako Deek-Robot ), otóż moduł ten ma dwa wejścia zasilania: jedeno dla silnika opisane jako VIN ( np. z baterii), drugie dla logiki opisane jako VCC ( np. Arduino ) W przypadku podłączenia TYLKO napięcia dla silników ( 9V ) VIN, na VCC dostaję 5V ( cały czas mowa o module ). Do VCC mam podpięte 5V z arduino. Arduino się włącza i działa ( bez swojego zasilania ). Wygląda to tak, że cały zestaw jest zasilany bateriami 9v podłączonymi do modułu z L293D. Czy to bezpieczne dla stabilizatora na płytce Arduino że na pinie 5V dostaje napięcie z "zewnątrz" ? -
Kurs budowy robotów - #9 - ekspander I/O, serwo
__ROBI__ odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
do silników wykorzystuję : Pololu TB6612FNG mam tam trzy piny na silnik ( dwa kierunek, jeden PWM ). ciekawe, na pewno trzeba poeksperymentować 😉 Dzięki za pomoc i wskazówki 🙂 -
Kurs budowy robotów - #9 - ekspander I/O, serwo
__ROBI__ odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Dzięki za pomoc 🙂 Fakt, całkiem zapomniałem o PWM - biblioteka servo zdaje się rozwiązuje to programowo i dlatego też o tym nie pomyślałem 😉 wgląda na to że najlepszym rozwiązaniem jest przełączenie wszystkiego co się da do expandera: czujniki podczerwieni, przełączniki, włącznik i wszystko to co wymaga odczytu/ustawienia konkretnego stanu (HIGH/LOW). hmm, można by się pokusić o podpięcie pinów sterujących kierunkiem silnika do expandera, a PWM kontrolować z płytki, zawsze to cztery piny zaoszczędzone 😉 Muszę to sprawdzić. Dzięki jeszcze raz -
Kurs budowy robotów - #9 - ekspander I/O, serwo
__ROBI__ odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Mój pierwszy wpis, więc chciałbym się przywitać. Dzień dobry 🙂 Pytanie które nie daje mi spokoju, czy do ekspandera można w jakiś sposób podłączyć omawiany w rozdziale czujnik odległości lub serwo. W przypadku serwa, nie jestem pewien w jaki sposób przekazać pin z ekspadera do np. servo.attach(x). Najlepiej byłoby : serwo.attach(expander.... no właśnie co ? Dzięki za kursy, są świetne i inspirują 🙂