karol2003
-
Zawartość
27 -
Rejestracja
-
Ostatnio
-
Wygrane dni
3
Osiągnięcia użytkownika karol2003
")





-
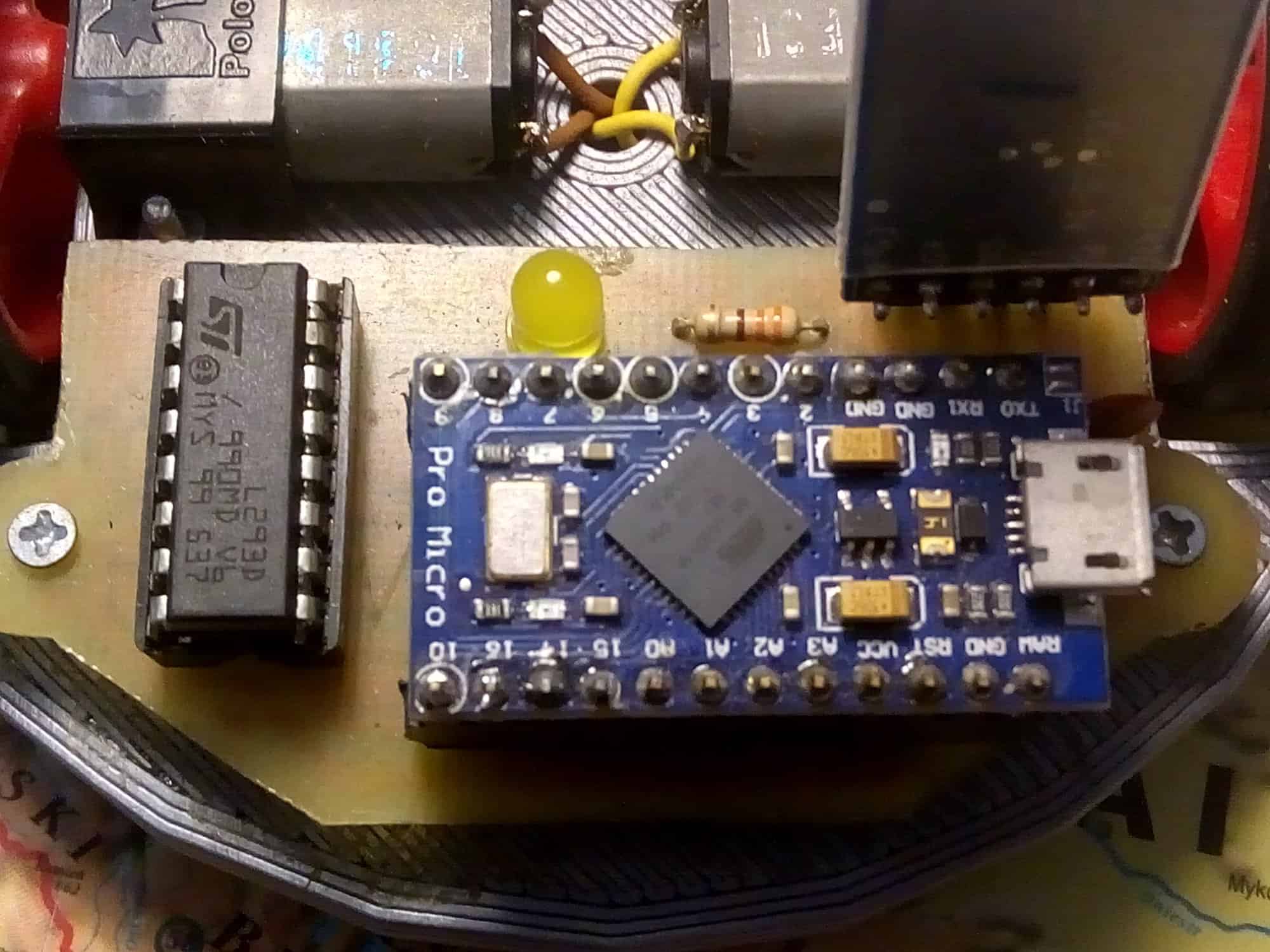
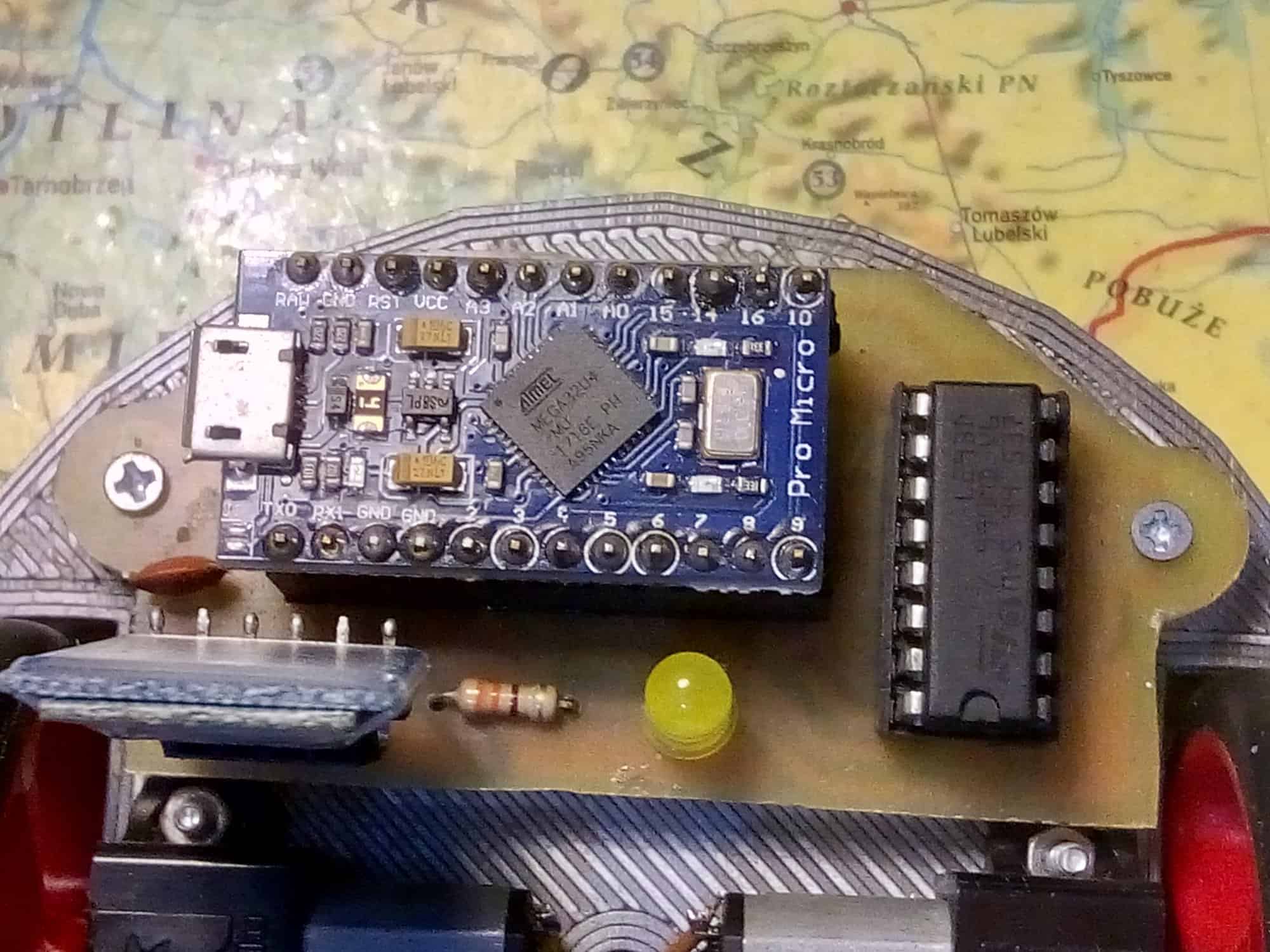
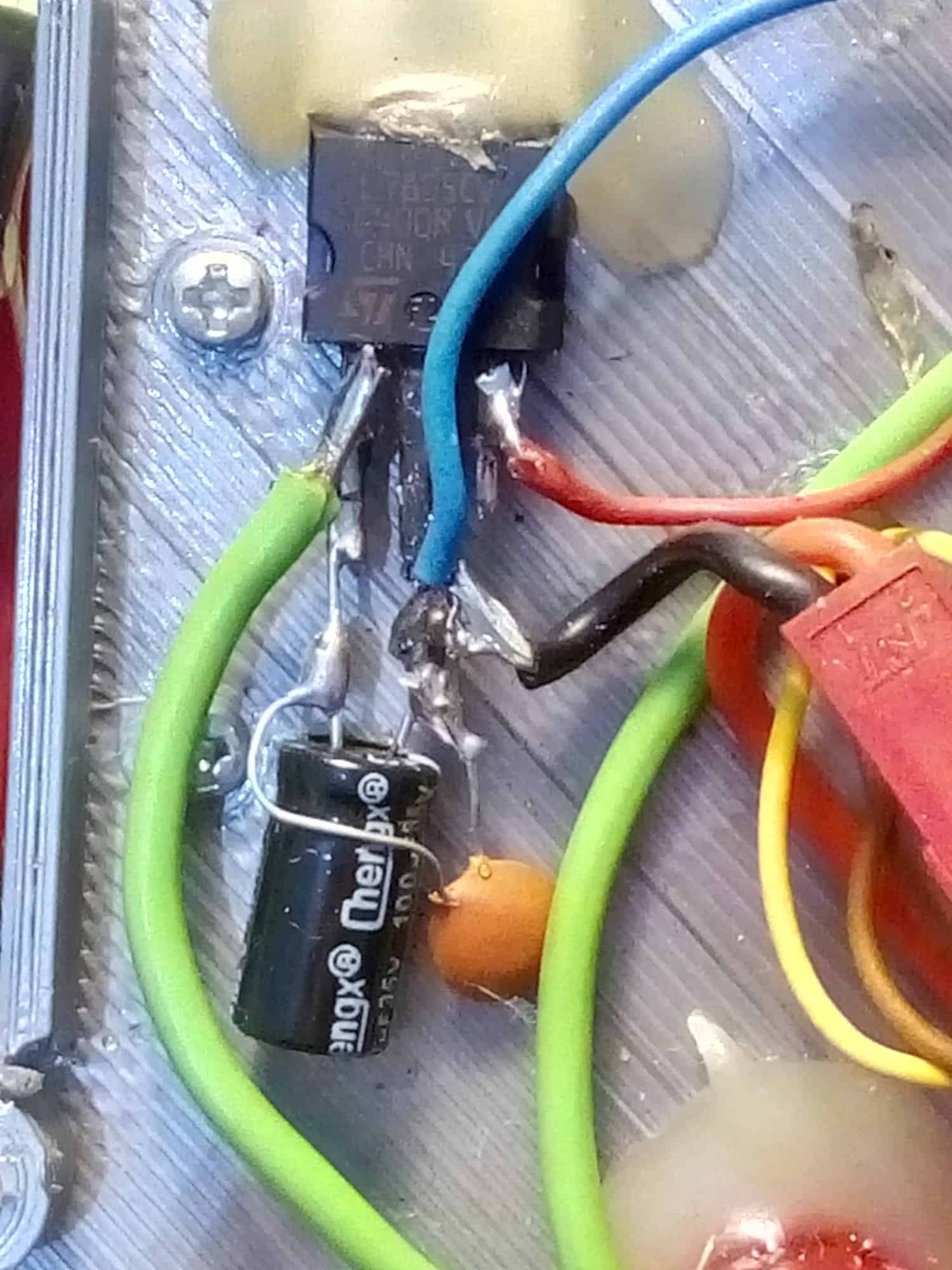
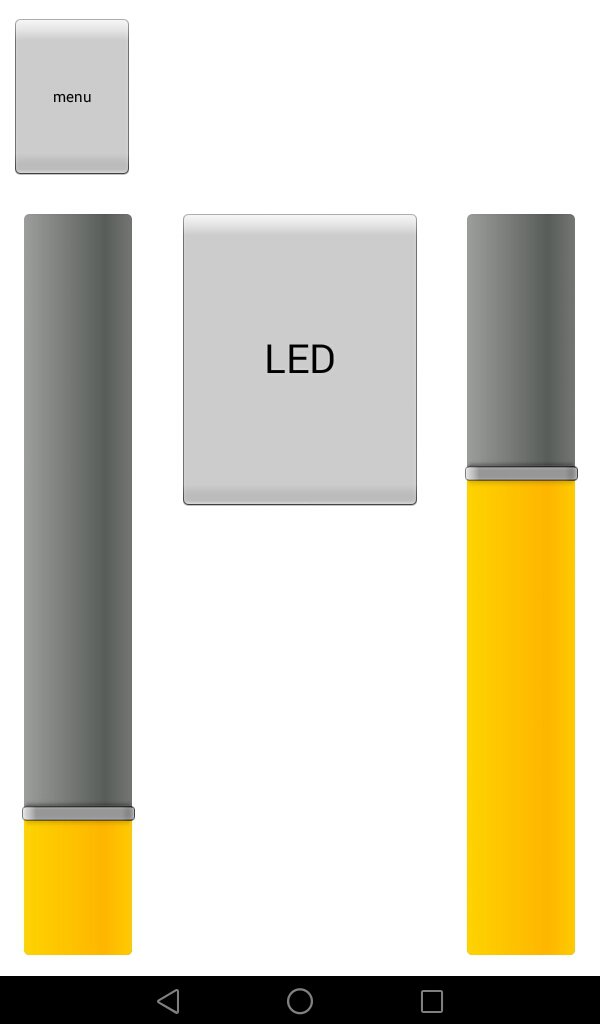
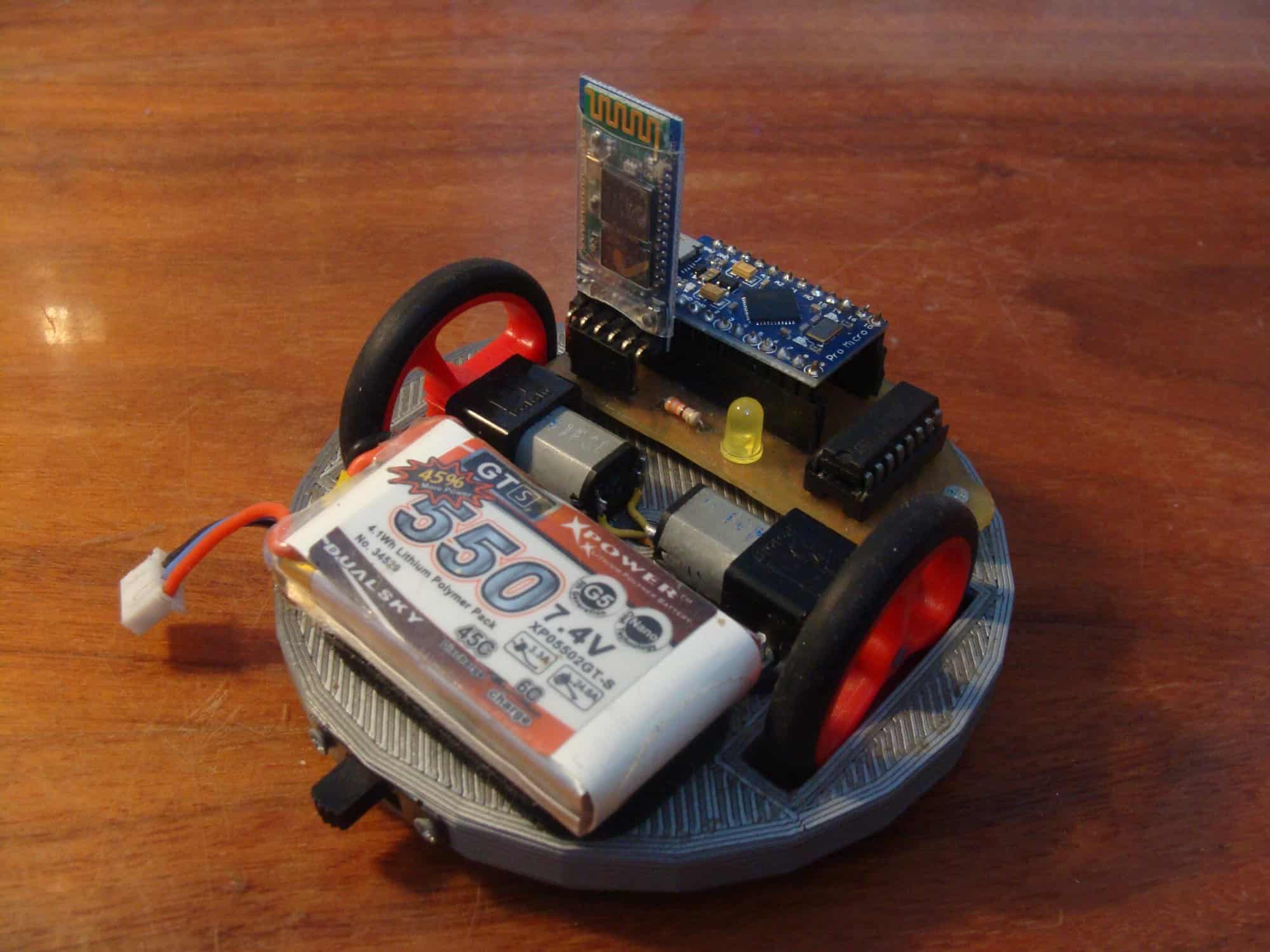
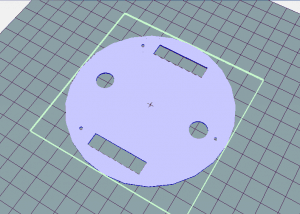
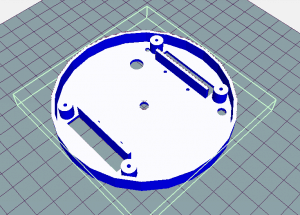
Witam, chciałbym przedstawić swoją konstrukcję, a mianowicie robota mobilnego o nazwie Bluebot – od połączenia słów bluetooth oraz robot 😉. Jak można się domyślić, konstrukcja jest sterowana przez bluetooth z poziomu aplikacji, co było głównym założeniem. Ponadto chciałem, aby robocik miał jak najbardziej estetyczny wygląd. Pozwolę sobie przejść teraz do szczegółowego opisu. Podwozie Podwozie (a właściwie korpus) zostało wydrukowane na drukarce 3d. Składa się z górnej części – głównej, oraz dolnej – pokrywki przymocowanej do pierwszej części za pomocą trzech wkrętów. Na pierwszej warstwie bardzo mocno są widoczne „paski” nanoszonego filamentu, ale zmniejszając temperaturę głowicy przy kolejnych wydrukach udało mi się trochę zmniejszyć widoczność tego defektu (ktoś ma jakieś pomysły co jeszcze można zrobić?). Zdjęcia pierwsze i drugie przedstawiają model korpusu, natomiast trzecie wspomnianą „wadę” 😉 wydruków. Warto jeszcze dopisać, że podwozie jest kołem o średnicy 100mm. Elektronika Elektronika robocika nie jest skomplikowana. „Sektor sterujący” składający się z arduino micro (akurat takie wykorzystałem, równie dobrze można było użyć każdego innego), sterownika silników L293D (nie zdecydowałem się na gotowy moduł TB6612 ze względu na oszczędność miejsca 😉) i modułu bluetooth HC-05 (zmieściła się jeszcze dioda LED, kondensator ceramiczny i rezystor) znajduje się na płytce PCB, którą sam wykonałem metodą termotransferu. Do narysowania projektu płytki wykorzystałem program Eagle, do trawienia użyłem wytrawiacza B327. Płytka cechuje się nietypowym kształtem widocznym na zdjęciu. Druga część elektroniki, a mianowicie stabilizator L7805 z parą kondensatorów, znajduje się w korpusie. Tam „ułożyłem” także wszystkie przewody, tak, że po zamknięciu obudowy żaden kabelek nie jest widoczny. Zastosowałem taki przełącznik suwakowy, który pełni rolę włącznika. Zastosowany akumulator to pakiet Dualsky 2S 7,4V 550mAh 45C, mieści się idealnie pomiędzy kołami, został przymocowany do podwozia za pomocą rzepu. Mechanika Zastosowałem znane silniczki Pololu z przekładnią 50:1. Jak już wcześniej wspomniałem, są sterowane przez układ L293D. Nie miałem jeszcze problemów z taką kombinacją. Mocowania Pololu, koła także Pololu – 40mm, czerwone (są wciskana na D-kształtny wał). Trzecim punktem podparcia jest dioda Led 10mm, nie świeci. W pierwotnej wersji miały być dwie – z przodu i z tyłu, ale jedna wystarczyła (robot jest delikatnie przechylony do przodu, poza tym dodając czwarty punkt podparcia jedno z kół mogłoby nie dotykać podłoża). Algorytm Sterowanie odbywa się z poziomu RoboRemo Free – aplikacji na urządzenia z systemem Android. Darmowa wersja pozwala na korzystanie z pięciu elementów jednocześnie. Działanie aplikacji zostało przystępnie wyjaśnione w tym filmie. Kod napisałem w Arduino IDE. Sterowanie pojazdem wygląda następująco: przesuwając lewy suwak zwiększa się prędkość lewego silnika, analogicznie prawy suwak. Fragment kodu (gdzie wartość ‘p’ to wartość suwaka, która jest wysyłana do arduino): if (cmd[0] == 'p') { unsigned int prawy = atof(cmd + 2); Serial.println(prawy); analogWrite(PWM_B, prawy);} Dodatkowo podczas przytrzymywania przycisku ‘LED’ zapala się żółta dioda na płytce PCB w robocie. Odpowiada za to ten fragment kodu: if (strcmp(cmd, "led 1")==0) { digitalWrite(ledPin, HIGH);} if (strcmp(cmd, "led 0")==0) { digitalWrite(ledPin, LOW);} Film To byłoby na tyle, dziękuję Wam za przeczytanie mojego opisu, zachęcam do zadawania pytań, na wszystkie postaram się odpowiedzieć 🙂 .






-
Opisz DIY związane z elektroniką i odbierz 50 zł w Botland
karol2003 odpisał w temacie użytkownika Komentator • Ogłoszenia organizacyjne
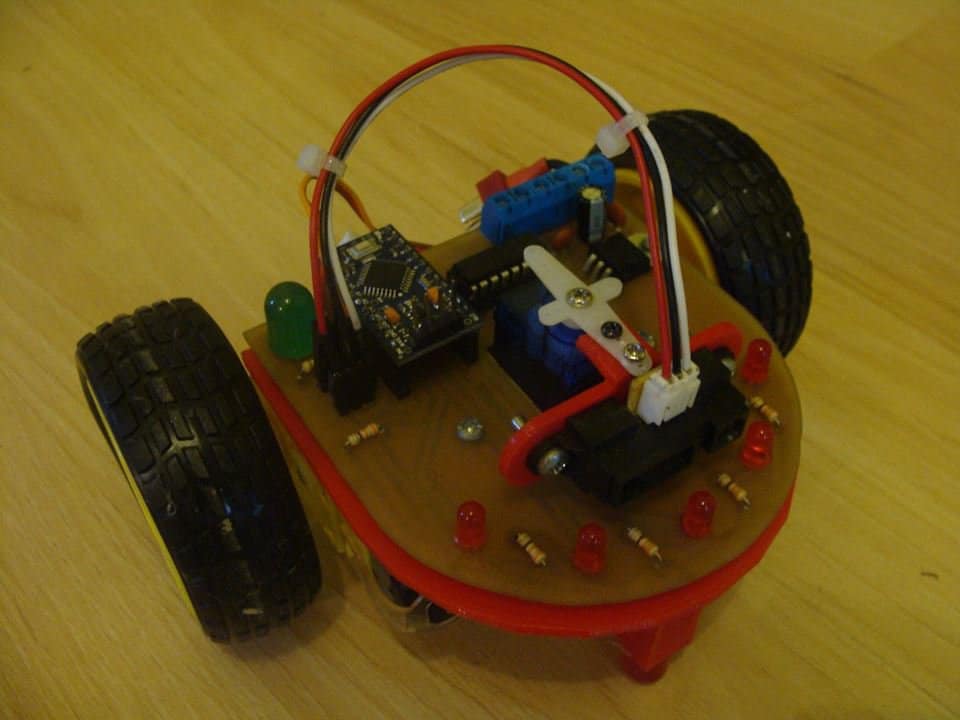
Czy w ramach promocji mogę opisać: a) robota mobilnego sterowanego z poziomu tabletu przez bluetooth (pierwsze zdjęcie)? b) konstrukcję, która omija przeszkody i wybiera kierunek, gdzie jest więcej miejsca? Czujnik jest zamontowany na serwie, a położenia przeszkód są sygnalizowane przez diody LED (drugie zdjęcie)? Jeżeli tak, to obydwa roboty w dziale Projekty - roboty?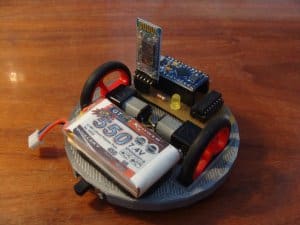

-
Kurs Raspberry Pi - #11 - filmy, slowmotion, timelapse
karol2003 odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Bardzo fajny kurs, wszystko jest jasno i prosto wytłumaczone 😀. Mój film poklatkowy (zdjęcia robiłem 4h) 😉: -
Ręka robota sterowana przez arduino, nasz kanał youtubowy.
karol2003 odpisał w temacie użytkownika mistudio • Arduino i ESP
mistudio, teraz będziesz wykonywał drugą rękę? Jaka część robota będzie następna? Może warto umieszczać wszystkie posty o tym projekcie w worklogu https://www.forbot.pl/forum/konstrukcje-nieukonczone-vf53.htm, aby wszystko było w jednym miejscu? 😉 Pozdrawiam -
mistudio, bardzo podoba mi się ten projekt 🙂 . Czy tak samo jak przy całej dłoni https://www.forbot.pl/forum/topics23/reka-robota-sterowana-przez-arduino-nasz-kanal-youtubowy-vt15686.htm#127913 w jednym palcu są dwie linki - jedna do rozluźniania a druga do zaciskania? Gdzie zakupiłeś te linki, albo inaczej - jakie jest ich codzienne zastosowanie, skąd je wziąłeś? Pozdrawiam, karol2003
-
Kurs lutowania - #7 - przerzutnik bistabilny, tranzystory
karol2003 odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Treker, faktycznie, dopiero po Twoim komentarzu zauważyłem, że nie da się wstawić tych przycisków w płytkę inaczej. Byłem skupiony na tym, co się dzieje na mojej płytce stykowej. -
Kurs lutowania - #7 - przerzutnik bistabilny, tranzystory
karol2003 odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
wilq_89, będąc zainteresowany i zaciekawiony Twoim problemem, postanowiłem stworzyć taki przerzutnik u siebie na płytce stykowej. Stwierdziłem, że łatwiej będzie znaleźć problem. Po podłączeniu wg schematu układ zachowuje się tak, jak na poniższym filmie: Długo szukałem problemu, wszystko było podłączone dobrze, aż w końcu znalazłem błąd - przyciski 💡, bowiem po zmianie układ działał poprawnie (poniższy film): Po zrobionych pomiarach (dwa poniższe filmiki) wyciągnąłem takie wnioski (patrz rysunek po filmikami): 1. Niezależnie czy przycisk jest/nie jest załączony, złącza 1. i 3. oraz 2. i 4. są stale połączone. 2. Złącza 1. i 4. oraz 2. i 3. zwierają się po wciśnięciu przycisku. Jak widzisz, w moim przypadku problemem były źle połączone przyciski. Za pomocą multimetru zrób takie pomiary u siebie i napisz, co wyszło 😉 . -
Kurs lutowania - #7 - przerzutnik bistabilny, tranzystory
karol2003 odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
wilq_89, Co masz na myśli? Co się dzieje? Mógłbyś opisać to dokładniej? -
Kurs lutowania - #5 - las rezystorów, plecionka, topnik
karol2003 odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
wilq_89, mój "patent" na przytrzymywanie większych elementów (np. złączy ARK) jest taki, że płytkę mocuję tylko w jednym zacisku trzeciej ręki, natomiast drugim nastawiam i przytrzymuję dany element. Ale to tylko mój sposób, może ktoś ma lepszy 😉 . -
Kurs elektroniki – #6 – diody krzemowe oraz świecące (LED)
karol2003 odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Grzesiek, na niektórych z Twoich zdjęć dioda się nie świeci, ponieważ włożyłeś jej wyprowadzenia w ten sam rząd pinów na płytce stykowej (tak, jakbyś połączył wyprowadzenia diody przewodem 😉 ). Zajrzyj w ten artykuł, jest tam dokładnie wszystko wytłumaczone: Jak działa płytka stykowa? Zdjęcia, budowa, przykłady. -
Kurs Arduino - #2 - podstawy programowania, porty I/O
karol2003 odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Grzesiek, odnośnie Twojego pytania: Pin D7 na Arduino jest ustawiony jako wejście, czyli pobiera dane z otoczenia. Gdyby nie dochodziłby żaden sygnał, to ten pin D7 zbierałby szumy z otoczenia i odczyt (HIGH czy LOW) byłby przypadkowy. Aby temu zapobiec, w programie ustawiono ten pin jako INPUT_PULLUP, czyli wejście, które jest podciągnięte do góry, czyli do 5V (HIGH). Dlatego, kiedy przycisk nie jest wciśnięty, dochodzi do niego sygnał HIGH. Natomiast po wciśnięciu przycisku pin D7 zostaje zwarty do GND (0V), i dlatego odczytuje sygnał niski. W zrozumieniu zasady działania przycisków podciągniętych do góry pomoże Ci ta ilustracja z tego tematu: link -
Treker, dziękuję 🙂 . Jeżeli chodzi o oprogramowanie to na pewno będą jakieś eksperymenty związane z prędkością i precyzją przejazdu. Natomiast elektroniki nie będę rozbudowywał. Tak jak napisałem w podsumowaniu, kilka rzeczy trzeba zmienić, ale to już w następnej konstrukcji 😉 .
-
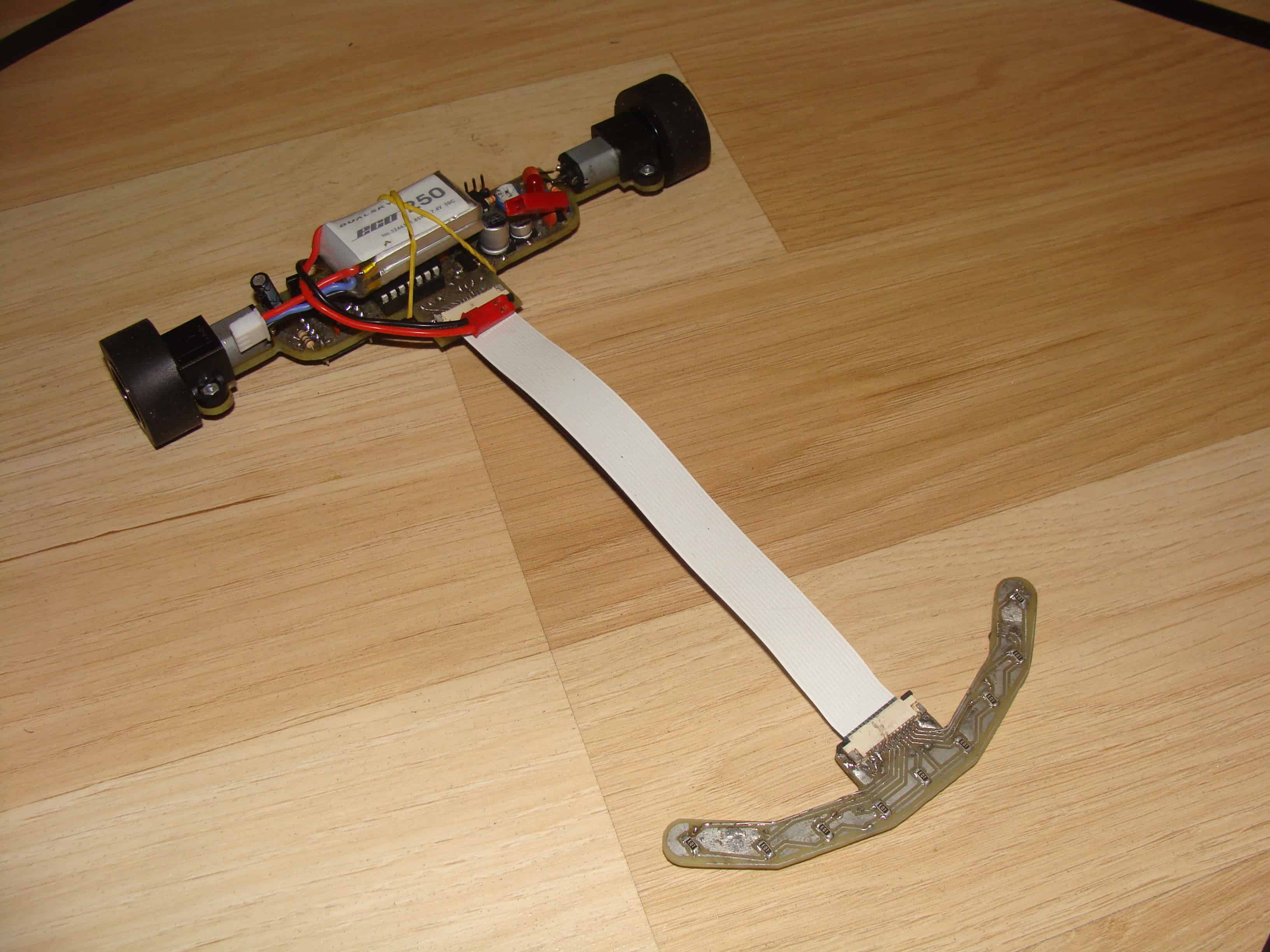
Witam! Mając więcej wolnego czasu, postanowiłem opisać swojego robota – linefollowera Orzeł. Pomysł zrodził się w sierpniu, w październiku skończyłem konstrukcję mechaniczną, później trwała zabawa z kodem, strojenie, dostosowywanie wag czujników itd. Robot miał wystartować na zawodach Cyberbot w Poznaniu w maju br., które jednak się nie odbyły 🙁 . Mechanika Podstawę robota stanowią dwie dwustronne płytki PCB o grubości 1,5mm – główna i z czujnikami. Są połączone za pomocą listewki węglowej o szerokości 4mm – trochę za mało, ponieważ elementy zostały połączone śrubkami M2. Masa robota wynosi około 90g bez akumulatorka, najwięcej ważą silniki (znane Pololu 10:1 HP z przedłużonym wałem). Z akumulatorem mój linefollower ma masę około 105g, z czego jestem zadowolony. Wymiary: 170mm szerokości, 215mm długości, 29mm wysokości (bez akumulatora). Elektronika Sercem robota jest microkontroler Atmega328P. Sterownik silników to moduł TB6612. Jako czujników użyłem popularnych KTIR0711S w liczbie dziewięciu. Cześć z nich jest podłączona bezpośrednio do Atmegi, część jest podłączona do komparatora LM339L. Płytki PCB robiłem samodzielnie (projektowane w Eagle, wykonane metodą termotransferu), jestem z nich zadowolony, w niektórych miejscach grubość ścieżek wynosi 0,4mm. Zasilanie Do zasilania konstrukcji używam pakietów Li-pol Dualsky 7,4V o pojemności 220mAh i 250mAh. Elektronika zasilana jest przez stabilizator, napięcie na silniki idzie bezpośrednio z akumulatora. Program Program został napisany w środowisku Arduino IDE. Nie jest on skomplikowany, regulator P z dodatkami (których nie chciałbym zdradzać 😉 ). Osiągnięcia Robot osiąga prędkość ponad 1m/s, ale zachowuje się wówczas bardzo nerwowo. Na pierwszym filmie jego prędkość wynosi około 0,7m/s, na drugim – około 0,9m/s. Podsumowanie Ogólnie jestem zadowolony z prac. Nabrałem trochę doświadczenia z tego typu konstrukcjami, poćwiczyłem robienie płytek dwustronnych i lutowanie w SMD. Wnioski: - silniki powinny być także zasilane przez stabilizatory; - listewka węglowa musi być szersza; - ciągłe podłączanie robota do komputera i zmiany w kodzie są uciążliwe, w następnej konstrukcji zmiany prędkości, wag czujników itp. będą dokonywane poprzez moduł bluetooth; Zachęcam do komentowania i zadawania pytań 😉 . Schematu i kodu nie umieszczam. Pozdrawiam, karol2003

-
[Inny] Prosty robot na podczerwień "Żółw"
karol2003 odpisał w temacie użytkownika karol2003 • Projekty - DIY (początkujący)
Ds3, masz rację - jeżeli nie robimy płytki dwustronnej to połączenia zrobione ze srebrzanki wyglądają zdecydowanie lepiej niż połączenia zrobione z przewodów KYNAR 😃 . Dziękuję za wszystkie porady - na pewno przydadzą się w przyszłości 😉 . -
[Inny] Prosty robot na podczerwień "Żółw"
karol2003 odpisał w temacie użytkownika karol2003 • Projekty - DIY (początkujący)
Tak, robotem steruję za pomocą pilota IR - jest to główny cel. 😉 . Nie robiłem przelotek i warstwy TOP, połączenie zaznaczone na czerwono zrobiłem za pomocą przewodu KYNAR. Chodzi o połączenia na warstwie TOP?