chudek
-
Zawartość
22 -
Rejestracja
-
Ostatnio
Osiągnięcia użytkownika chudek
")




-
Tutaj reaguje na dotyk, docelowo ma działać prościej - po jednorazowym uruchomieniu cały czas, byleby się nie zacinało przy chwytaniu. Tej zabawki w zasadzie nie będzie używał kot, tylko dziecko z ograniczoną sprawnością - jak się zacina jest afera 🙆♂️
-
Racja - źle się przyjrzałem. Wychodzi na to, że do 2 kg*cm - nie mam pojęcia, czy takie się sprawdzi.
-
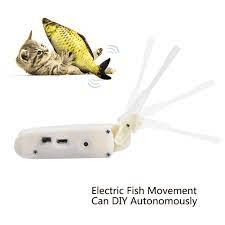
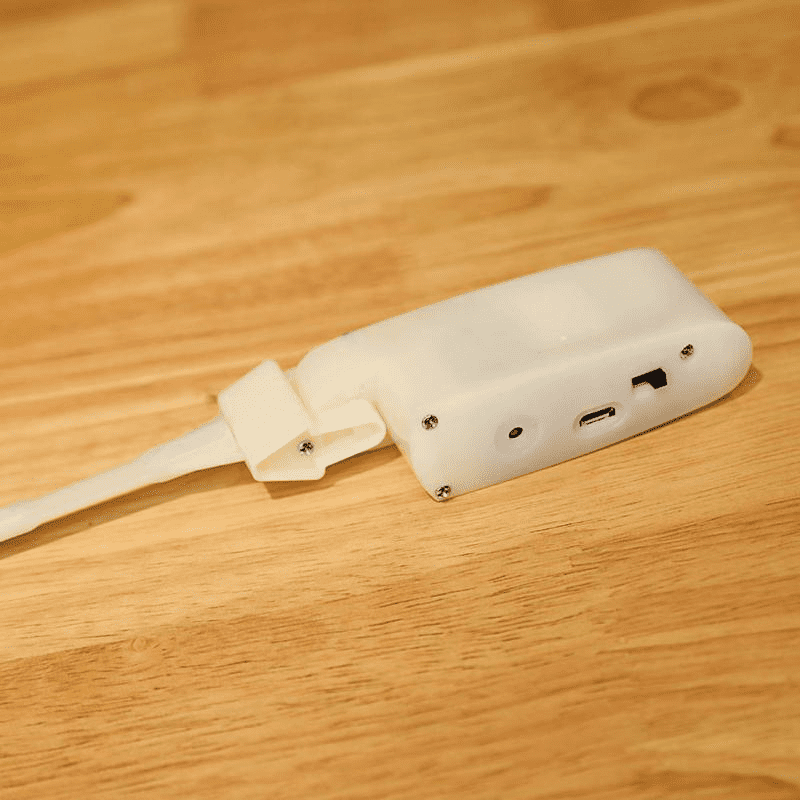
Witam, jestem posiadaczem skaczącej rybki dla kota, która przy użytkowaniu niestety się zacina. Dodatkowo bateria nie wytrzymuje dłużej niż 1,5 godziny. Pomyślałem o tym, aby stworzyć własny uproszczony mechanizm. Planuję wykorzystać do tego napęd, który po zasileniu obracałby dołączoną końcówką w zakresie maksymalnie 180 stopni (bez czujnika dotyku). Obudowę wydrukuję na drukarce 3D. Chciałbym zaczęrpnąć porady do doboru elementów. Poniżej pytania, które mi się nasunęły: 1. Czy serwomechanizm w tej aplikacji to dobry pomysł? 2. Czy serwomechanizm typu micro, z momentem do 60 kg*cm -> 2 kg*cm (poprawka) zda test? Czy nie będzie się zacinął? 3. Duża moc generuje duże zużycie energii - jakiego typu akumulator będzie najrozsądniejszy? Poniżej zamieszczam grafikę elementu, który chciałbym zastąpić: Z góry dziękuję za pomoc!
-
Najpierw planujemy zrobić prototyp z druku 3D. Będzie to materiał albo nylon albo abs. I te części, które podałem są właśnie to tego prototypu. Nie mamy jeszcze projektu, abym mógł policzyć masy.
-
Jak rozwiązać te problemy?
-
Jestem częścią w 5 osobowym zespole zajmująca się akurat tym. Mamy się tego nauczyć, po to robimy takie, większość z nas jest z 2 roku studiów, nie mogę odpuścić bo wiem i czuję że jest to wykonalne dla nas
-
Szukałem trochę i konkretnie do tego zastosowania nie umiem wywnioskować co będzie działać, ale jeszcze spróbuję
-
Nie wiem jak na to spojrzeć, jak poprawnie sprawdzić czy to będzie działało. To ma być manipulator do 500 zł, który będzie zasilany z gniazdka, sterowany z komputera myszka i klawiatura i podnoszący przedmioty typu pudełko od płyty. Co do problemu zasilania, powinienem wybrać zasilacz na 5 V i zastosować przetwornik napięcia? Czy np 9 V i stabilizator, czy po prostu zasilanie na 6 V (takich na botlandzie nie widziałem)
-
Witam, proszę o ocenę komponentów, które planuje wykorzystać do budowy manipulatora mającego unosić lekkie przedmioty typu plastikowe pudełko od płyty DVD. Celem jest, aby ramie w czasie rzeczywistym reagowało na sterowanie z klawiatury+myszki. Mikrokontroler: Arduino Pro 328 - 5V/16MHz Specyfikacja: Napięcie zasilania: od 5 V do 12 V Mikrokontroler: ATmega328 Maksymalna częstotliwość zegara: 8 MHz Pamięć SRAM: 2 kB Pamięć Flash: 32 kB (5 kB zarezerwowane dla bootloadera) Pamięć EEPROM: 1 kB Piny I/O: 14 Kanały PWM: 6 Ilość wejść analogowych: 6 Interfejsy szeregowe: UART, SPI, I2C Zewnętrzne przerwania Zabezpieczenie przeciw przepływowi zbyt dużego prądu Zabezpieczenie przed odwrotnym podpięciem zasilania Wymiary: 53,5 x 52 mm Konwerter USB-UART Konwerter USB-UART PL2303 - wtyk USB Zasilacz i gniazdo Zasilacz impulsowy 12V / 2A - wtyk DC 5,5 / 2,5mm Specyfikacja Napięcie zasilania: 110 V - 250 V AC Napięcie wyjściowe: 12 V DC Prąd wyjściowy: 2,0 A Długość przewodu: ok. 80 cm Wtyk: DC 5,5 / 2,5 mm (kompatybilny ze złączami 5,5 / 2,1 mm) Rodzaj wtyku: prosty Polaryzacja wtyku: plus w środku / minus na zewnątrz Zasilacz stabilizowany, zasilacz sieciowy Gniazdo DC 2,5/5,5 do prototypowej płytki stykowej Serwa Rysunek poglądowy z oznaczeniami S5 Serwo PowerHD HD-1711MG - medium Zasilane napięciem z zakresu: 4,8 - 6,0 V. Prędkość: 0,11 s/60°. Moment: 3,5 kg*cm Wymiary: 29,5 x 11,6 x 30,2 mm Masa: 17,5 g. Dwa serwa do obsługi pochylenia ramienia S1 i S2 Serwo Hitec HS-325HB - standard Prędkość: 0,15 s/60°. Moment: 3,7 kg*cm. Wymiary: 40 x 20 x 37 mm. Masa: 43 g. Dwa serwa do nadgarstka S3 i S4 Serwo PowerHD HD-1711MG - medium Zasilane napięciem z zakresu: 4,8 - 6,0 V. Prędkość: 0,11 s/60°. Moment: 3,5 kg*cm Wymiary: 29,5 x 11,6 x 30,2 mm Masa: 17,5 g. Silnik krokowy S0 Silnik krokowy JK42HS40-0504 200 kroków/obr 12V / 0,5A / 0,43Nm Silnik krokowy bipolarny , cztero przewodowy. Posiada rozdzielczość 200 kroków na obrót (1,8 stopnia). Zasilany jest napięciem 12,0 V, pobiera prąd 500 mA na cewkę. Moment wynosi 4,4k g*cm (0,43 Nm). Wymiary to 42 x 42 x 40 mm (NEMA 17). Proszę o uwagi, rady, jest to pierwszy projekt, jeśli opis nie zawiera jakiś istotnych informacji to proszę również mi to zasygnalizować. Pozdrawiam, chudek __________ Komentarz dodany przez: Treker
-
Witam, czy znacie coś, co mógłbym doczepić do drona, aby latając pozostawił ślad? Chodzi o efekt tego typu: Parametry drona(model: JJRC H31), które myślę że mogą być istotne przy wyborze substancji: Waga: 76g Wymiary: 29.00 x 29.00 x 9.00 cm Proszę o rady, jak mógłbym uzyskać taki efekt. Pozdrawiam
-
Fajnie rozumieć, jak mówią doświadczeni, dzięki za wyjaśnienie 😃 Gdyby komuś tęskno do akademickich teorii, to mikrokontrolerem nazywamy:
-
Najlepiej takie, których moment obrotowy będzie dopasowany do wielkości i masy konstrukcji, którą znasz tylko Ty (bo nie podałeś jej w swojej wiadomości). Do tego przydałoby się, aby ich prędkość spełniała założenia projektu, których również nie podałeś 🙂 Po Twoich pytaniach wnioskuję, że raczej nie masz dużego doświadczenia - zastanów się, czy nie lepiej zacząć od czegoś prostszego, co na pewno uda Ci się wykonać. Porywając się na taki projekt możesz tylko stracić pieniądze zainwestowane w źle dobrane komponenty. Jeśli jest inaczej to pochwal się jakimiś konkretami, ponieważ z Twojego postu wynika, że nie wiesz jakie wybrać napędy, jak zasilać robota, jaki kontroler jest potrzebny oraz jak nim sterować... Kontroler czy mikrokontroler? Czy "kontroler" nie pełni funkcji sterującej? Pytam i nawet w temacie, bo uczę się do egzaminu 😃
-
Zawody RobotChallenge 2017 - Pekin, 04-06.08.2017
chudek odpisał w temacie użytkownika Komentator • Zawody/Konkursy/Wydarzenia
Ja bym chętnie się wybrał, ale jak zdobyć tanio bilet do Pekinu? -
Kurs budowy robotów - wstęp, spis treści
chudek odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Szkoda, że nie kurs budowy drona, ale też spoko 😃 -
Nikt mądry jeszcze nie wie? Podam akademickie definicje od profesora, które może będą wskazówką dla dalszych rozważań. Odkopuję, ponieważ temat nie został wyjaśniony, a co jeśli przyszłe pokolenie tu trafi? Automatyzacja – jest to stosowanie urządzeń sterujących procesami ( np. technologicznymi) bez udziału lub z niewielkim udziałem człowieka (grec. automatos – samoczynny) Robotyzacja – jest to stosowanie urządzeń przeznaczonych do automatycznej manipulacji z możliwością wykonywania programowalnych ruchów względem kilku osi, wyposażonych w chwytaki lub narzędzia technologiczne