Kokos951
-
Zawartość
3 -
Rejestracja
-
Ostatnio
-
Wygrane dni
1
Osiągnięcia użytkownika Kokos951
")



-
Freestyle KT-tronic - wielozadaniowy robot jeżdżący
Kokos951 odpisał w temacie użytkownika Kokos951 • Projekty - DIY roboty
Postaram się jutro wrzucić filmik z trybu zdalnego sterowania. Co do głowy, stwierdziłem, że "maska" na korpusie wygląda całkiem nieźle i głowa mogłaby to zepsuć 🙂 W niedalekiej przyszłości głowa jednak zostanie dorobiona, gdy zajmę się trybem omijania przeszkód 😉 Edit, wrzuciłem filmik, w razie jakby ktoś nie zauważył 😉 musiałem zdemontować chwytaki na dłoni, ponieważ zbyt słabe serwa nie dawały rady ich podnieść. Muszę je przerobić i wykonać z lżejszych materiałów. -
Zdobądź Proxxona FBS 240/E - #12 - Mój robot
Kokos951 odpisał w temacie użytkownika Komentator • Zawody/Konkursy/Wydarzenia
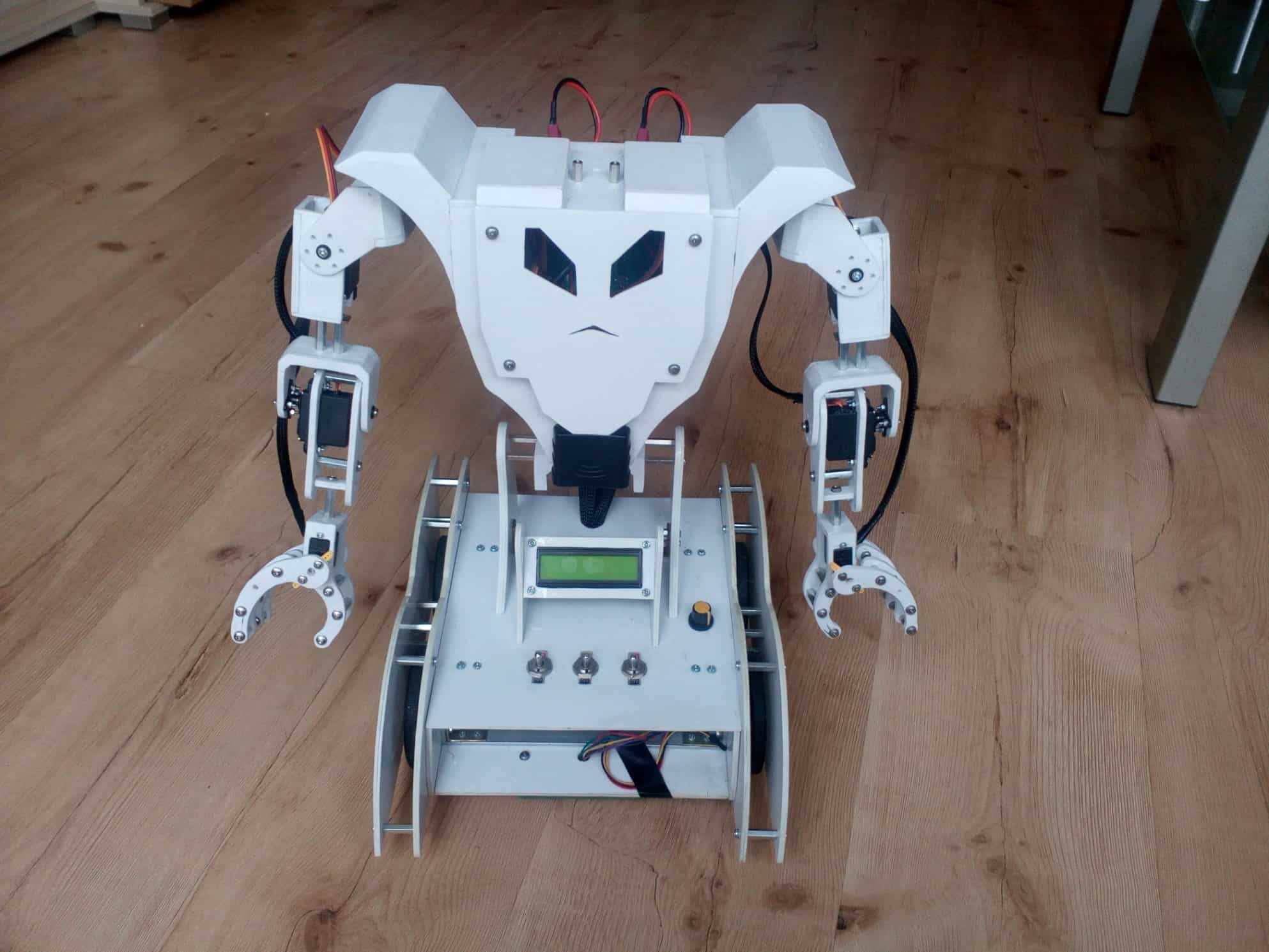
KT-tronic - jeżdżący robot wielozadaniowy. Robot wykonany został z polistyrenu HIPS. Posiada trzy tryby pracy (line following, zdalne sterowanie oraz jazdę autonomiczną z omijaniem przeszkód). W swoim asortymencie posiada między innymi 4 silniki Pololu oraz 9 serwomechanizmów modelarskich. Link do opisu: https://www.forbot.pl/forum/topics7/wielozadaniowy-kt-tronic-wielozadaniowy-robot-jezdzacy-vt12350.htm#105264 -
Freestyle KT-tronic - wielozadaniowy robot jeżdżący
Kokos951 opublikował temat w Projekty - DIY roboty
Witam wszystkich serdecznie 😉 Chciałbym przedstawić wielozadaniowego robota o nazwie KT-tronic. Pracowałem nad nim dość długo, ze względu na złożoną budowę. Robot ten może pracować w trzech trybach wybieranych przy pomocy odpowiednich przełączników. Te tryby to: • Line Following • Zdalne sterowanie • Autonomiczna jazda z omijaniem przeszkód Ten ostatni nie jest gotowy. Jest to jedynie plan na przyszłość. Konstrukcja mechaniczna Głównym materiałem, z którego została wykonana konstrukcja robota, jest polistyren wysoko udarowy HIPS. Materiał ten wybrałem ze względu na łatwość obróbki. Wszystkie części zostały zaprojektowane w programie SolidWorks, następnie każda z osobna wydrukowana i „przeprasowana” na kawałki polistyrenu przy pomocy żelazka. Należy jednak ograniczyć czas prasowania, ponieważ polistyren może się odkształcać pod wpływem temperatury. Tak gotowe elementy wycinałem zwykłym nożem do tapet i szlifowałem papierem ściernym. Napęd robota stanowią cztery silniki Pololu o przełożeniu 100:1, sterowane przy pomocy dwóch sterowników TB6612FNG. Do nich dołączone są koła o średnicy 80mm. Silniki zasilane są za pomocą akumulatora Li-Pol 11,1V o pojemności 900mAh. W robocie znajduje się 9 serwomechanizmów. Najmocniejsze dwa poruszają całymi rękoma. Ich moment wynosi 12kg*cm. Każda ręka złożona jest z czterech serw. Dziewiąte serwo porusza korpusem. Wszystkie serwomechanizmy otrzymują napięcie 6V, które zapewnia przetwornica step-down D24V22F6. Przetwornica zasilana jest tym samym pakietem Li-Pol co silniki. Całość waży 4,1kg. Wysokość robota to 42cm, a długość jednej ręki to 30cm. Elektronika Płytka PCB została wykonana w firmie Satland. Pracą robota steruje mikrokontroler ATmega2560. Wybrałem ten procesor głównie ze względu na ilość sprzętowych kanałów PWM. Zasilanie pochodzi z pakietu Li-Pol 7,4V, stabilizator liniowy stabilizuje napięcie do 5V. Zdecydowałem się na zastosowanie dwóch akumulatorów, głównie po to, by oddzielić zasilanie silników od zasilania procesora. Pozwoliło to zmniejszyć wpływ zakłóceń generowanych przez silniki. Na płycie dodatkowo znajdują się: • Mostki TB6612 • Złącze do programowania • Buzzer • Diody sygnalizujące poprawnie wykonane kolejnych części programu • Dzielniki napięcia. Przy pomocy wejść ADC mierzone jest napięcie z akumulatorów zasilających. Przy zbyt wysokim rozładowaniu robot przestanie pracować i buzzer zacznie piszczeć • Goldpiny do podłączenia czujników KTIR, wyświetlacza LCD, czujników HC-SR04 i odbiornika PS2 do komunikacji bezprzewodowej Tryby pracy: Line Following 5 transoptorów odbiciowych KTIR0711S znajduje się na płycie umieszczonej pod podwoziem robota. Czujniki znajdują się na wysokości ok. 1cm od podłogi. Jest to pewne utrudnienie podczas np. zdalnego sterowania, ponieważ robot ma trudności z pokonywaniem wyższych progów Zdalne sterowanie Do zdalnego sterowania wykorzystałem gamepad od PS2 z odbiornikiem. Dane przesyłane są do mikrokontrolera poprzez SPI. Maksymalny zasięg wynosi 8m. Omijanie przeszkód Robot będzie wykorzystywał dwa czujniki ultradźwiękowe HC-SR04. Jeden umieszczony zostanie na dole konstrukcji, a drugi na samej górze, być może przyczepiony do serwomechanizmu, żeby zwiększyć kąt wyszukiwania przeszkód. Poniżej przedstawiam zdjęcia poszczególnych elementów oraz etapy budowy 😉 Zdjęcie poniżej przedstawia projekt robota wykonany w programie SolidWorks Poniżej filmik, na którym robot wykonuje ruchy sekwencyjne. Polecam ściszyć głośność, ponieważ w kilku momentach odsuwam krzesło z tabletem 😃 nie chciałem, by kamera drgała przy chodzeniu, więc zastosowałem się do takiego sposobu 🙂 Plany na przyszłość: • Pomalować robota, żeby zamaskować niedoskonałości i ślady łączenia części • Dokończyć trzeci tryb tj. omijanie przeszkód • Koniecznie muszę wzmocnić mocowanie korpusu z serwomechanizmem do podstawy. Robot zbyt mocno buja się na boki, czego serwo może po pewnym czasie nie wytrzymać