JaRoBot
-
Zawartość
7 -
Rejestracja
-
Ostatnio
-
Wygrane dni
5
Osiągnięcia użytkownika JaRoBot
")





-

Manipulator Serwomechaniczne ramie V.1.0. JaRoBot
JaRoBot odpisał w temacie użytkownika JaRoBot • Projekty - DIY roboty
myślę ze dałoby radę lecz silniki wycieraczek mają swoiste "gniazda" instalacyjne w obudowie wiec byłby dość niewygodne do trwałego przytwierdzenia na ramieniu robota, jest to wykonalne lecz estetyka i problematyczność projektu znacząco spada 🙂 dodatkowo projekt był już częściowo wykorzystany z innego projektu gdyż planowałem wykonać coś innego natomiast mając juz wiele komponentów skonstruowałem ów wysięgnik 🙂 -
Manipulator Serwomechaniczne ramie V.1.0. JaRoBot
JaRoBot odpisał w temacie użytkownika JaRoBot • Projekty - DIY roboty
Witam, odpowiadam na pytania 🙂 a więc tak: orientacyjny koszt całości to około 700-800 zł najdroższe oczywiście były serwa około 240zł, sterownik 120zł, przetwornica+zasilacz 90zł + wiele innych nieco mniejszych kosztów aczkolwiek dających znaczną łączną sumę 🤯 . Serwa kupowane w sklepie Botland aczkolwiek przyznam ze mam do nich kilka zastrzeżeń, choć być może to wina kontrolera mini maestro - serwa od czasu do czasu wpadają w rezonans - drgania 😕 . Co do obciążenia to podnosi pustą butelkę szklana o wadze około 0,41kg, poniekąd myślę ze przy wzmocnieniu obrotnicy (podpórek) byłoby w stanie podnieść nawet 1kg! :-> Przetwornica którą zastosowałem to właśnie ta: http://allegro.pl/show_item.php?item=5648199168 zapewnia stabilną moc i napięcie ➕➕🙂 ogólnie jeśli chodzi o mechanikę nie ma większych problemów , jeśli o elektronikę wyłącznie sterownik gdyż Mini maestro nie nadaje się do pracy ciągłej ➖ [ Dodano: 28-04-2016, 09:33 ] Dorzucam kilka nowych zdjęć 😉➕ Ps czekam na propozycje rozwinięcia bądź zastosowania tego projektu na szerszą skalę 🙂😅 ➕➕ -
Witam, pragnę zaprezentować serwomechanicznę ramię nad którym pracowałem przez jakiś czas, zdaje sobie sprawę iż nie jest doskonałe i wymaga jeszcze dopracowania wielu szczegółów, poniekąd jestem konstruktorem amatorem 🙂 lecz to co robię sprawia mi wielką przyjemność i poczucie osiągania danego celu poprzez naukę, cierpliwość i wytrwałość 🙂 Serworamię V.1.0. zbudowane jest na podstawie plastikowej obudowy w której zamieszczony jest transformator wraz z przetwornicą napięcia do której to przytwierdzone jest jedno z wielu serw mg995 towerPro dzięki temu obrot ramienia wynosi niemal 230 stopni :-> Wysięgnik ramienia oraz 2 moduł ramienia napędzany jest przez sprzężone serwa mg995 przez co siła uciągu jest podwójna - zapewnia to stabilność oraz znaczne zwiększenie siły wykonywanej pracy. ➕ Ostatni moduł ramienia oraz chwytak to spreparowane gotowe konstrukcje zakupione w sklepie botland 😉 również napędzane przez serwa mg995 ➕ Ogolnie całość napędza 7 serw mg995, zasilacz 150W/12V wraz z przetwornicą 300W step down nastawioną na 6V 💡 za bezpieczeństwem odpowiada moduł czujnika temperatury i wentylatora na przetwornicy który pokazuje aktualną temperaturę stabilizatora napięcia. Prąd jaki osiąga podczas pracy przy dużym oporze to blisko 8 Amper. Sterownik jaki zastosowałem obecnie to serwokontroler Polulu mini Maestro 12 kanałowy lecz nie jest on wystarczający do takich prac z powodu częstego "gubienia" zapisanych sekwencji pracy, przez co odtworzenie przynosi wiele uśmiechu 😋 myslę o zastosowaniu Arduino w celu tworzenia skryptu oraz przekaźników do zasilania serw - całość będzie bezpieczna, gdyż styki na mini maestro przy gniazdach GoldPin praktycznie się stopiły od prądu przez nie płynącego. 🙄❓ z pewnościa konstrukcja wymaga poprawek i wielu modyfikacji, lecz sam nie ukrywam nie mam wystarczająco wiele czasu by działać z tym na bieżąco. 😖 😉 zapraszam na film: (video od polowy filmu) __________ Komentarz dodany przez: Treker Następnym razem pamiętaj o dodaniu zdjęć o proporcjach ~3:2 w załączniku (jest one wyświetlane w katalogu robotów). Teraz poprawiłem to za Ciebie 🙂

-
Sprzedam robota MAOR 12V2 + zestaw dodatków!
JaRoBot opublikował temat w Sprzedam/Kupię/Zamienię/Praca
Witam, wszystko jak w temacie, sprzedaje iż chcę zbudować swego robota od podstaw, ten sprawuje się świetnie działa w 150 procentach lecz największą radość daję budowanie oraz projektowanie elementów oraz obwodów, a ten już gotowy, choć także daje wiele przyjemności. Pozdrawiam, w razie pytań czekam na kontakt. Aukcja kup teraz: link: http://allegro.pl/robot-maor-12v2-rcrv2-isp-pilot-minisumo-linef-i3984278143.html -
Witam, proszę o pomoc w znalezieniu modułów radiowych MOBOT RCRv2 ---> może ktoś wie gdzie można kupić bezpośrednio lub ktoś ma na sprzedanie. Pozdrawiam.
-
Freestyle Wielozadaniowy militarny Robocik "JAROBOT"
JaRoBot odpisał w temacie użytkownika JaRoBot • Projekty - DIY roboty
jak tylko załatwię odpowiednią kamerę to zmontuje fajny filmik na temat jego pracy 🙂 poki co zastanawiam się jak go jeszcze ulepszyc, choc trochę brak środków, a już mam plany na nowy duzo lepszy pojazd 😉 [ Dodano: 07-01-2014, 11:04 ] Wracając do zastosowania:) dla kogo piwo??? -
Freestyle Wielozadaniowy militarny Robocik "JAROBOT"
JaRoBot opublikował temat w Projekty - DIY roboty
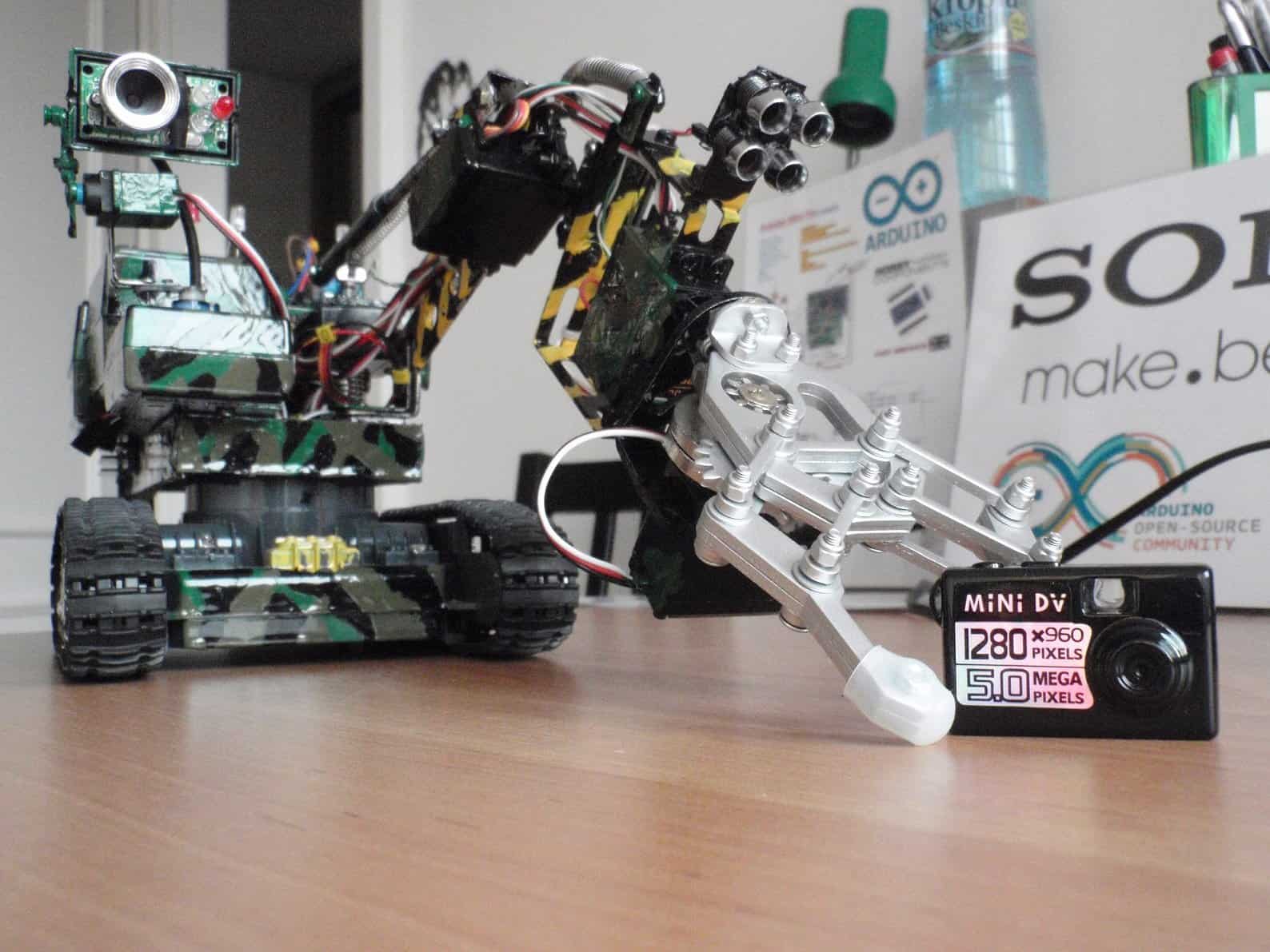
Witam serdecznie, konstrukcja którą stworzyłem jest pierwszym doświadczeniem tego typu, ponieważ bardzo interesują mnie roboty mobilne którymi można sterować ze znacznej odległości i wykonywać różnego rodzaje prace, tym bardziej fascynuje mnie to iż najprawdopodobniej tak będzie wyglądała nasza przyszłość gdzie większość czynności będą wykonywały zdalnie sterowane roboty, a także te ze sztuczną inteligencją. Dlatego też postanowiłem stworzyć niewielkim kosztem pojazd który będzie w stanie coś podnieść, przenieść, sfilmować z niewielkiej odległości. Długi czas myślałem nad rozwiązaniem jakie zastosować podwozie, idealne wydawało mi się podwozie gąsienicowe Tamiya, lecz było zbyt małe, dlatego też zastosowałem podwozie z koparki które dodatkowo posiada możliwość obrotu kabiną, niepotrzebną górę i cały korpus zdemontowałem i delikatnie przebudowałem aby powstała możliwość zainstalowania ramy nośnej wszystkich elementów, powstała tzw nadbudówka z wykorzystaniem plastikowych obudów w której znalazły się wszystkie elementy elektroniczne - ma to też taką korzyść że nie są narażone na czynniki zewnętrzne. Przystępując do pracy mając odpowiednie elementy takie jak serwa modelarskie, części mechaniczne, oraz chwytak zmontowałem ramię: Następnie konstrukcja zaczynała przypominać to co w chwili obecnej: lecz pojawiły się pierwsze problemy z jakimi musiałem walczyć, mianowicie było to mocowanie ramienia do ramy głównej i przeniesienie odpowiedniej siły, by nie opadało automatycznie pod własnym ciężarem, do tego też serwo chwytaka i obrotnika to Futaba o momencie 3,2kg, natomiast dwa kolejne są z metalowymi zębatkami Tower Pro 996R o momencie 12kg, a zastosowanie odpowiedniego przeniesienia mocy poskutkowało znakomicie co widać na zdjęciach: ramię nie opada samoczynnie, choć trochę waży. Kolejne etapy to planowanie rozłożenia poszczególnych elementów tak by całość nie przypominała stosu kabli. wtedy także pojawił się kolejny problem jakim było zasilanie wszystkich elementów, obecnie zostałem przy koszyku 6xAA choć to stanowczo za mało, niebawem spróbuję kupić koszyk na minimum 8sztuk lub pakiet około 11V, ponieważ jest trochę "odbiorników prądu" pod względem elektronicznym są to kolejno idąc od zasilania: 1.przetwornica oraz stabilizator napięcia z wyświetlaczem LED 2. Miniaturowa przetwornica napięcia 5V 800mAh - dla zasilania wentylatorka 3.Programator USB komunikacyjny z Arduino Mini Pro 4. Wyświetlacz LED mierzący napięcie wyjściowe drugiego obwodu zasilającego takie elementy jak oświetlenie LED oraz Arduino 5. Dodatkowa przetwornica napięcia 5V 800mAh dedykowana dla Arduino 6. Główny moduł Arduino Mini Pro ATmega328 z zegarem 16Mhz 7. Sterownik serwomechanizmów Mini Maestro Polulu 6-kanałowy 8. Sterownik bipolarnego silnika krokowego w wyposażeniu lecz aktualnie brak zastosowania Elektronika została podłączona w ten sposób by całość mogła być sterowana z poziomu Arduino, czyli sterownik serwomechanizmów Mini Maestro ma dwie możliwości kontroli nad serwami: pierwsza to bezpośrednio kablem USB, a druga to sterowanie przez moduł Arduino i tak np zapisanie na nim odpowiednich komend i ich późniejsze odtwarzanie, całość została zmontowana tak że można go wyposażyć o np czujniki odległości SHARP'a i napisać odpowiednie sekwencje ruchów, przekaźnik nie pełni tu istotnej roli w danej chwili gdyż odpowiada tylko za migotanie niebieskiej diody, pod moduł Arduino podłączony jest zestaw diod LED które migotają na pomarańczowo oraz czerwono, a także sterownik bipolarnego silnika krokowego którym można łatwo sterować, ale póki co nie znalazłem dla niego zastosowania. Po zmontowaniu całości i wyposażeniu w kamerkę oraz zastosowaniu w niej czerwonej migającej diody prezentuje się świetnie zwłaszcza w tak pomalowanym "bojowym" kolorze militarnym 🙂