hometuning
-
Zawartość
3 -
Rejestracja
-
Ostatnio
Osiągnięcia użytkownika hometuning
")




-
Line follower LineFollower by Johny
hometuning odpisał w temacie użytkownika hometuning • Projekty - DIY roboty
Układ czujników w takiej formie raczej opóźnia 😋 działanie (chociaż nieznacznie) był wzorowany na linefollowerze 3pi, w chwili wolnego czasu odwrócę płytkę co spowoduje szybsze "łapanie" zakrętów. Czujniki są na taśmę dlatego ze będę je obracał. Kod jak na razie jest nie czytelny bo ciągle coś dodaje testuje, jak będzie przyzwoicie wyglądał to umieszczę. -
Line follower LineFollower by Johny
hometuning odpisał w temacie użytkownika hometuning • Projekty - DIY roboty
Robot cofa się jak na trzech czujnikach wykryje podłogę, czyli w tym przypadku za szybko jechał i nie zdążył wyhamować (nie używam pwm bo dowiedziałem się o tym dopiero po zrobieniu płytki i na tych pinach mam ledy). Na filmie robot się zahaczył o łączenie taśmy (jeszcze nie miałem ślizgacza przyczepionego tylko śrubę. Kod pisałem w C w WinAvr. Kalibracja działa tak, że: -stawiam na podłożu, zapamiętuje wartość podłoża -stawiam na linii, zapamiętuje wartość linii -liczę średnią, co jest powyżej średniej to jest linia Nie potrafię zapisywać do EEPROMU dlatego za każdym razem muszę kalibrować od nowa. -
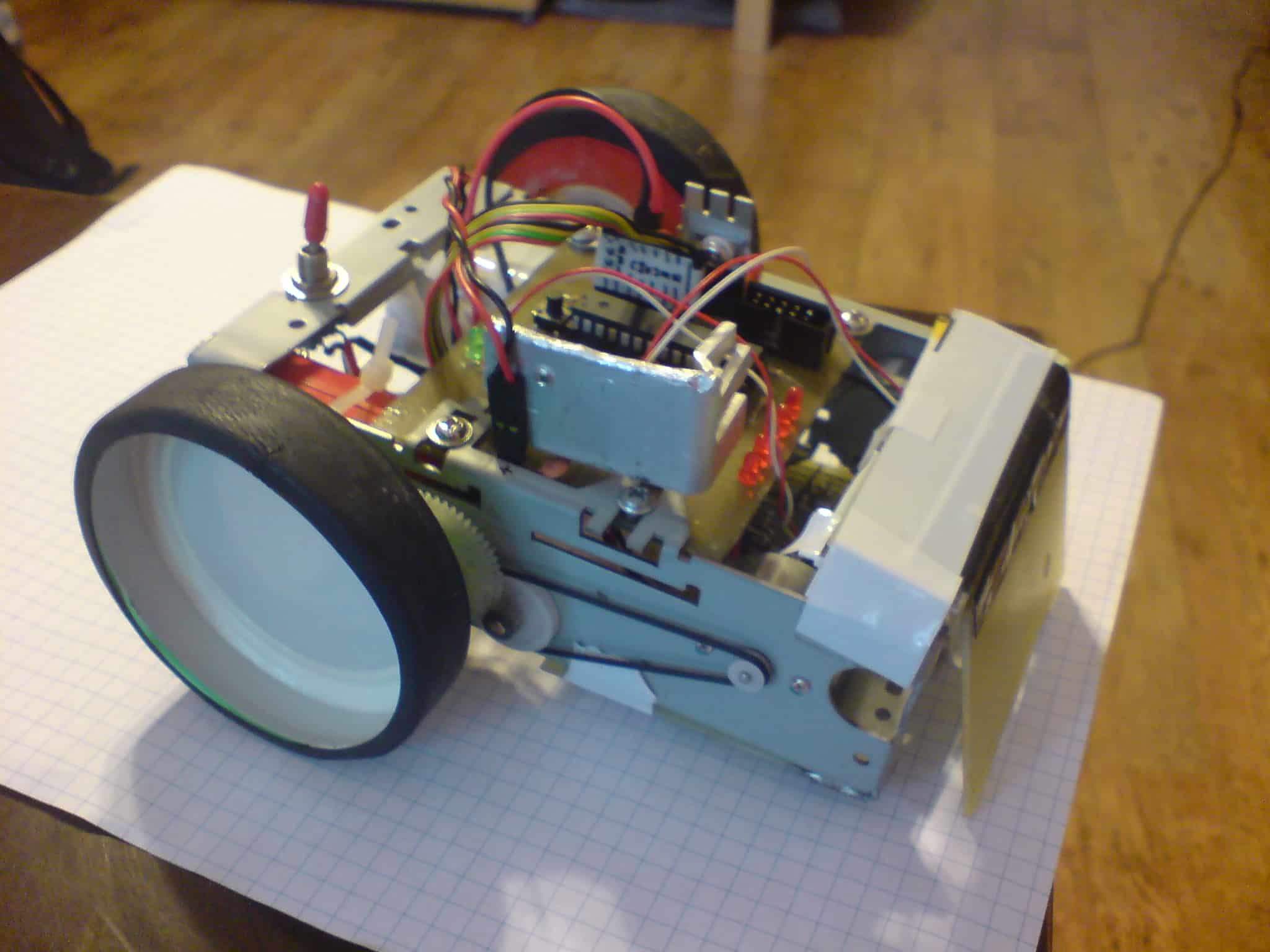
Jest to mój pierwszy projekt robota mobilnego. LineFollower dzięki użyciu przetwornika ADC posiada algorytm kalibracji jasności podłoża oraz linii (duża czułość jest dobrze widoczna na filmie). Jak na razie używam tylko trzech czujników bo dobrze się spisuje i nie widzę potrzeby włączania 2 pozostałych. Dodatkowym elementem jest zderzak, robot po dotknięciu przeszkody odwraca się i jedzie z powrotem (niestety nie mam jeszcze filmu). Elektronika: -uC atmega8 -driver silników l298 -czujniki linii CNY70 Mechanika: -obudowa z silnikami i przekładniami to 2 napędy wysuwania tacki z cd-romu -ślizgacz z lego -koła zakrętki (sos z tesco i łowicza 😋) + dętka rowerowa -mocowanie kół na zębatce jest z docisku płyty w cd-romie