Drozdzu
-
Zawartość
14 -
Rejestracja
-
Ostatnio
-
Wygrane dni
1
Osiągnięcia użytkownika Drozdzu
")





-
Ładny i szybki LF Wam wyszedł 😉 Mam dwa pytania odnośnie zasilania: 1. Napięcie na silniki jest bezpośrednio podawane z Li-pol'a czy jest stabilizowane? 2. Jakiego układu używacie do stabilizacji napięcia logiki? Jest to jakiś stabilizator liniowy czy przetwornica? Gratuluję udanej konstrukcji.
-
Kontroler PI (proporcjonalno-całkujący)
Drozdzu odpisał w temacie użytkownika cebulak • Układy programowalne
P = kp * blad; I = Ip + (ki * Tc * pop_blad); U = P + I; pop_blad = blad; Ip = I; -
Chciałbym przedstawić naszą najnowszą konstrukcję wspierającą kreatywność konstruktorów. Nie może tego zabraknąć w każdym warsztacie (kreatywność 😃). Projekt został wykonany w programie Inventor fusion. kieliszek2 (2).zip kieliszek2.zip
-
[Zawody] Festiwal Robotyki ROBOCOMP 2014 - 25.10.14, Kraków
Drozdzu odpisał w temacie użytkownika Treker • Zawody/Konkursy/Wydarzenia
➕ koszulki ➕ cenne nagrody, ładne medale ➕ poczęstunek: pączki, woda, a nawet pizza 😃 ➕ pomimo zamieszania i braku dobrej organizacji organizatorzy nadrabiali poczuciem humoru ➖ zły stan techniczny płyt do LF'a, płyty były brudne i zniszczone ➖ bardzo długie zmagania w Lego Sumo, finał był rozgrywany dwa razy, gdyż zawodnicy zdobyli tą samą liczbę punktów ➖ komunikaty były słabo słyszalne w strefie serwisowej ➖ przedłużenie zawodów, problemy organizacyjne ➖ przy każdej zmianie tras do LF'a występowały problemy z pomiarem czasu, zdarzało się, że czas był mierzony stoperem przez sędziego -
Popatrz na roboty innych użytkowników forum, w dziale Katalog Robotów, może znajdziesz jakieś inspiracje dla swojej konstrukcji. https://www.forbot.pl/forum/robots_list.php?tag=Line%20follower
-
Wyłącz cyfrowe podpisywanie sterowników.
-
Co się dzieje jak napięcie spada? Nie dopuszczam do takiej sytuacji i często sprawdzam stan Li-Pola i jak napięcie spada to wymieniam akumulator na drugi. Nie mam problemu z tymi akumulatorami bardzo długo mi trzymają. Ostatnio na zawodach w Rzeszowie jeden akumulator wystarczył mi na całe kwalifikacje w dwóch kategoriach pomimo tego, że zrobiłem sporo przejazdów.
-
Podczas "domowych testów" jeżdżę wolniej, ponieważ nie mam aż tyle wolnego miejsca do testowania co na zawodach gdzie są duże tory. Na zawody to dopiero przyjadę do Opola.
-
Na trasie finałowej w najlepszym przejeździe ok 53%, a podczas kwalifikacji w najlepszym przejeździe ok 45% maksymalnego wypełnienia PWM
-
Biblioteki potrafię robić, robiłem bibliotekę do złącza ZIF (nie mogłem znaleźć pasującej), a biblioteka do złącza wydawała mi się nie potrzebna (skoro można zrobić inaczej 😅 ) Wagi nie są liniowe są dobrane na podstawie wielu testów i prób. Nastawy regulatora też są wynikiem setek prób. Podczas testów poznaje się swojego robota i wie się jak zmiany wartości w poszczególnych członach wpłyną na zachowanie robota.
-
Złącze nie sprawia żadnych problemów. Dobrze i pewnie trzyma i nie ma obaw że akumulator się odepnie. Z wypinaniem też nie ma problemów, dość łatwo się wypina bez używania dużej siły. Nie obawiam się że wyrwę złącze ponieważ otwory nie nie były dość ciasne i złącze pewnie w nich siedzi oraz dodatkowo nałożone jest na nie dość dużo cyny 😉 Biblioteki do złącza nie mam, nie robiłem własnej. Po prostu pomierzyłem złącze suwmiarką i położyłem kilka dużych padów smd koło siebie podczas projektowania płytki w eaglu i tak powstało złącze 😃
-
Tak, traktuję je jako cyfrowe wejścia i odczytuję tylko dwa stany niski i wysoki. Nie używam ADC. Zdaję sobie sprawę z tego że nie mam żadnej kontroli nad odczytami w zależności od podłoża, ale podczas testów na różnych podłożach robot spisywał się dobrze i nie miałem żadnych problemów z czujnikami.
-
Zastosowałem taki akumulator, ponieważ taki akumulator posiadałem już wcześniej i nie odczuwałem potrzeby kupna nowego 😃 Ostatecznie na silniki podawane jest ok. 8V, jest to regulowane potencjometrem. 19 czujników podłączyłem w prosty sposób, każdy czujnik jest podłączony do osobnego pinu uc.
-
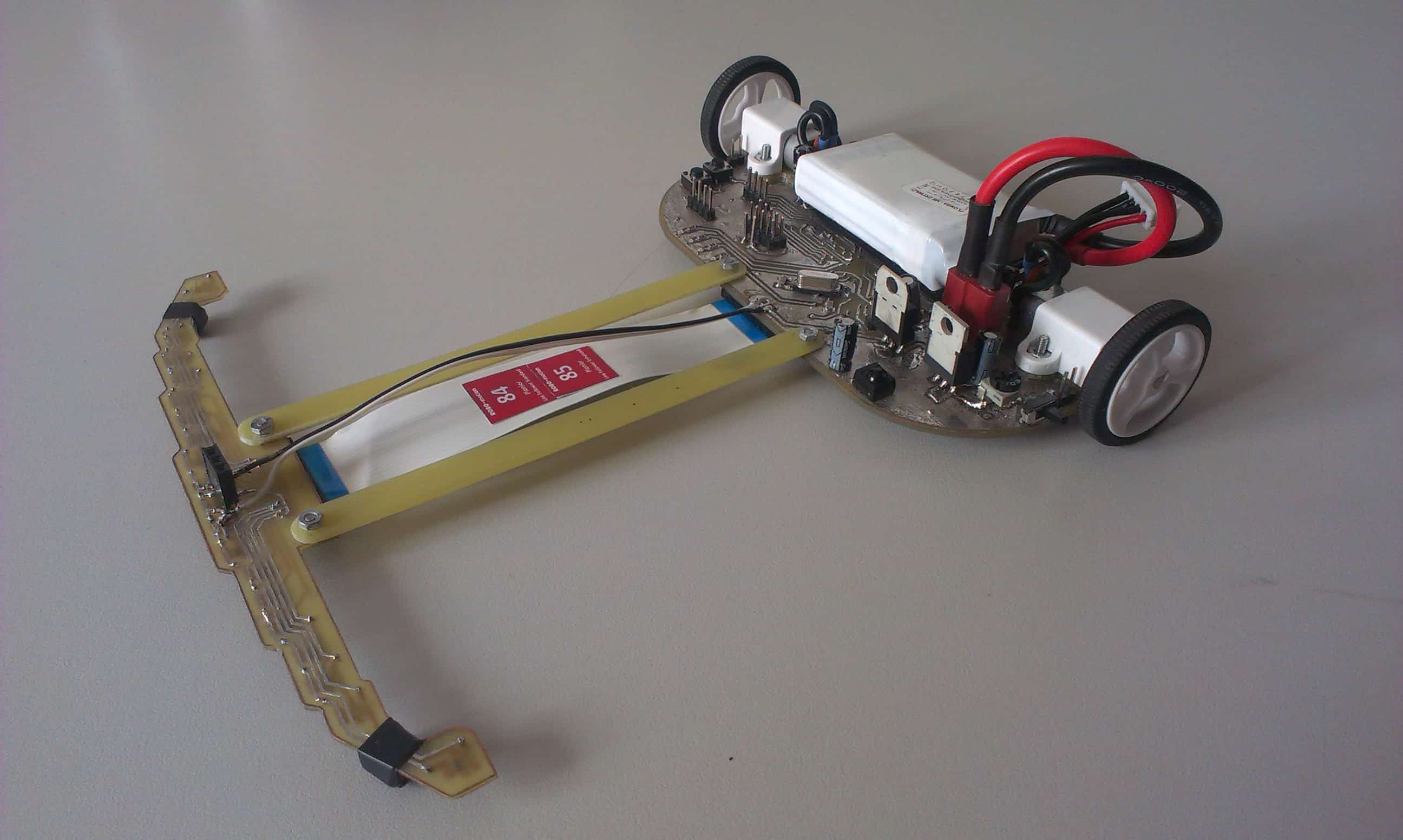
Witam. Chciałbym Wam przedstawić mojego najnowszego robota klasy Line Follower Standard o nazwie "Pionier". Po raz pierwszy robot zaprezentował się na zawodach Robomaticon 2014 w Warszawie. Jest to moja druga konstrukcja tego typu. Konstrukcja mechaniczna Robot składa się z dwóch modułów: płytki z czujnikami oraz modułu głównego. Obie płytki w całości zostały wykonane przeze mnie. Oba moduły zostały połączone dwiema cienkimi listewkami z wytrawionego laminatu o grubości 1.6 mm. Koła jakie używam to standardowe koła Pololu oraz koła Solarbotics. Całość wraz z akumulatorem i kołami waży 137g. Średnia prędkość robota to 1 - 2 m/s w zależności od trasy. Moduł z czujnikami Starałem się by masa modułu była możliwie jak najmniejsza. Płytka została wykonana z laminatu o grubości 1 mm. Wymiary płytki to: 160 mm x 15 mm. W module zastosowałem 19 czujników KTIR ułożonych w łuk. Na płytce zostało umieszczone złącze dla cyfrowego czujnika odległości Sharp 40 cm. Moduł z czujnikami jest połączony z modułem głównym za pomocą złącz ZIF i taśmą FFC. Moduł główny Moduł główny jest podwoziem konstrukcji. Oprócz układów elektronicznych umieściłem na nim silniki napędowe, którymi są dwa silniki Pololu 10:1 HP. Podwozie zostało wykonane z laminatu o grubości 1.6 mm. Wymiary płytki: 130 mm x 60 mm. Elektronika Sercem robota jest mikrokontroler Atmega128. Procesor jest odpowiedzialny za odczyt stanów z czujników, realizację algorytmu i sterowaniem mostkami. Silnikami sterują dwa mostki H TB6612. Kanały w mostku zostały połączone dzięki czemu wzrosła wydajność prądowa mostka. Z innych elementów na płytce znajdują się: złącze programatora, wyprowadzenia do interfejsu USART, odbiornik podczerwieni TSOP2236, 2 przyciski, 4 diody led oraz kwarc 16 MHz. Zostały też wyprowadzane piny na enkodery magnetyczne AS5304, które zamierzam zamontować. Całość zasilana jest z pakietu Li-Pol Redox 3S 11.1V. Pakiet zamocowany jest na rzepy dzięki czemu nie ma problemów z jego wyjęciem, np. do ładowania. Zasilanie z Li-Pola trafia na dwa stabilizatory. Jeden z nich to stabilizator regulowany LM338T o wydajności 5A odpowiedzialny za zasilanie silników, drugi to stabilizator liniowy jednonapięciowy 78S05 odpowiedzialny za zasilanie procesora i reszty podzespołów. Oprogramowanie Program został napisany w języku C. Do podążania za linią używany jest regulator PD. Osiągnięcia - 6 miejsce Robomaticon Warszawa 2014 - kategoria Line Follower Standard (wtedy jeszcze pod starą nazwą) - 2 miejsce ROBO~motion Rzeszów 2014 - kategoria Line Follower Standard - 2 miejsce ROBO~motion Rzeszów 2014 - kategoria Line Follower Enhanced Zdjęcia i filmy Podsumowując jestem zadowolony z konstrukcji. Wiele się przy niej nauczyłem, wyeliminowałem błędy konstrukcyjne i programowe z pierwszego robota. Zachęcam do wyrażania opinii i uwag na temat robota jak i zadawania pytań.