amilo_pa
-
Zawartość
15 -
Rejestracja
-
Ostatnio
Osiągnięcia użytkownika amilo_pa
")



-
STM32F103 + CAN -> procek nie wypuszcza ramki z banków FIFO
amilo_pa opublikował temat w Mikrokontrolery
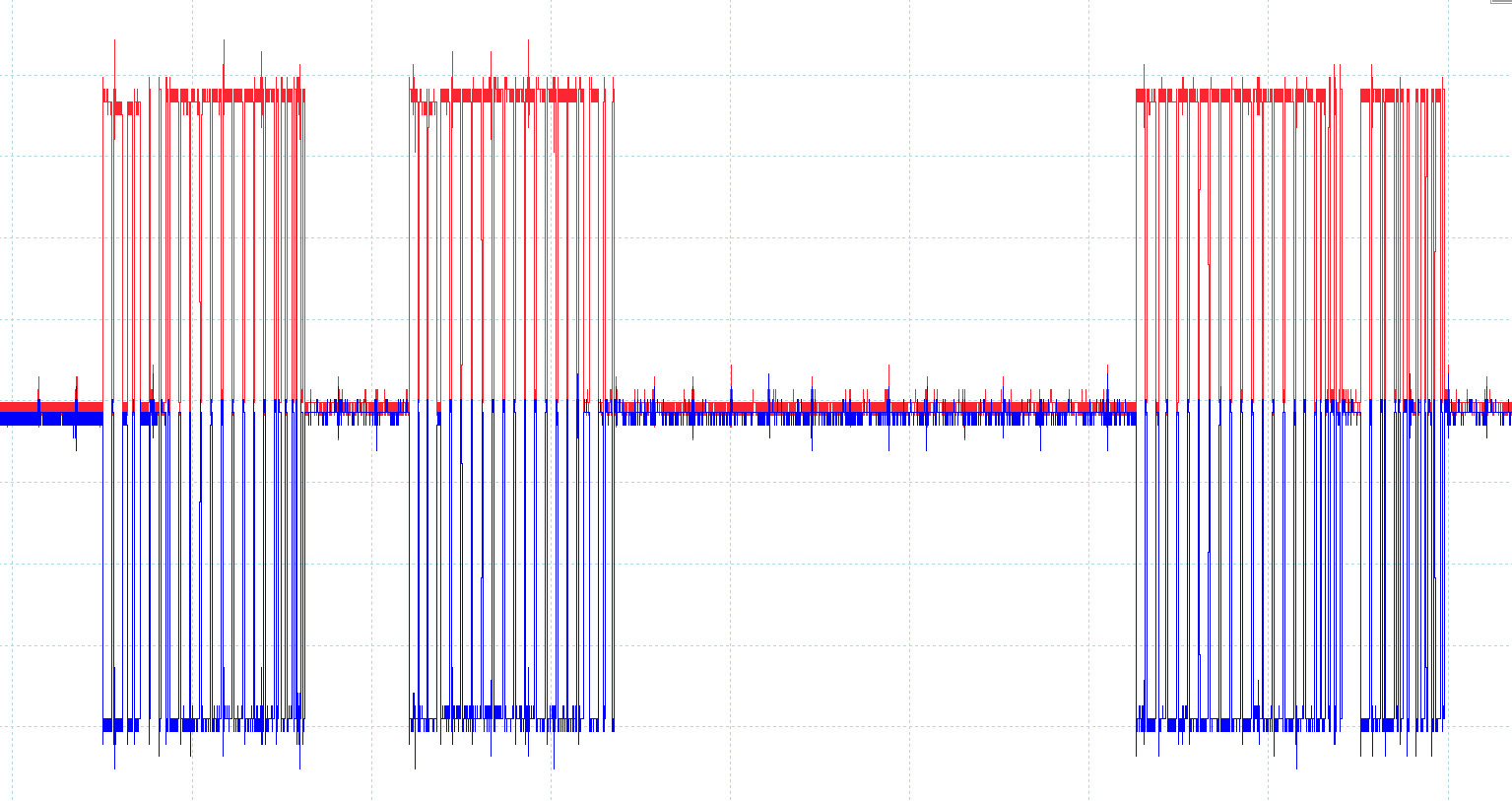
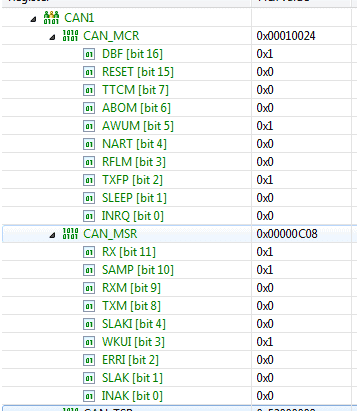
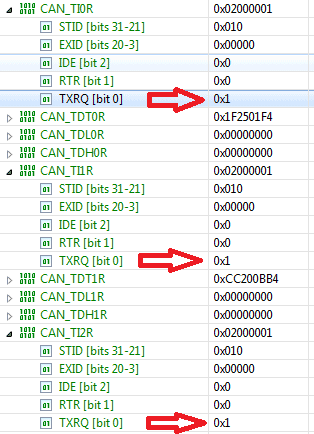
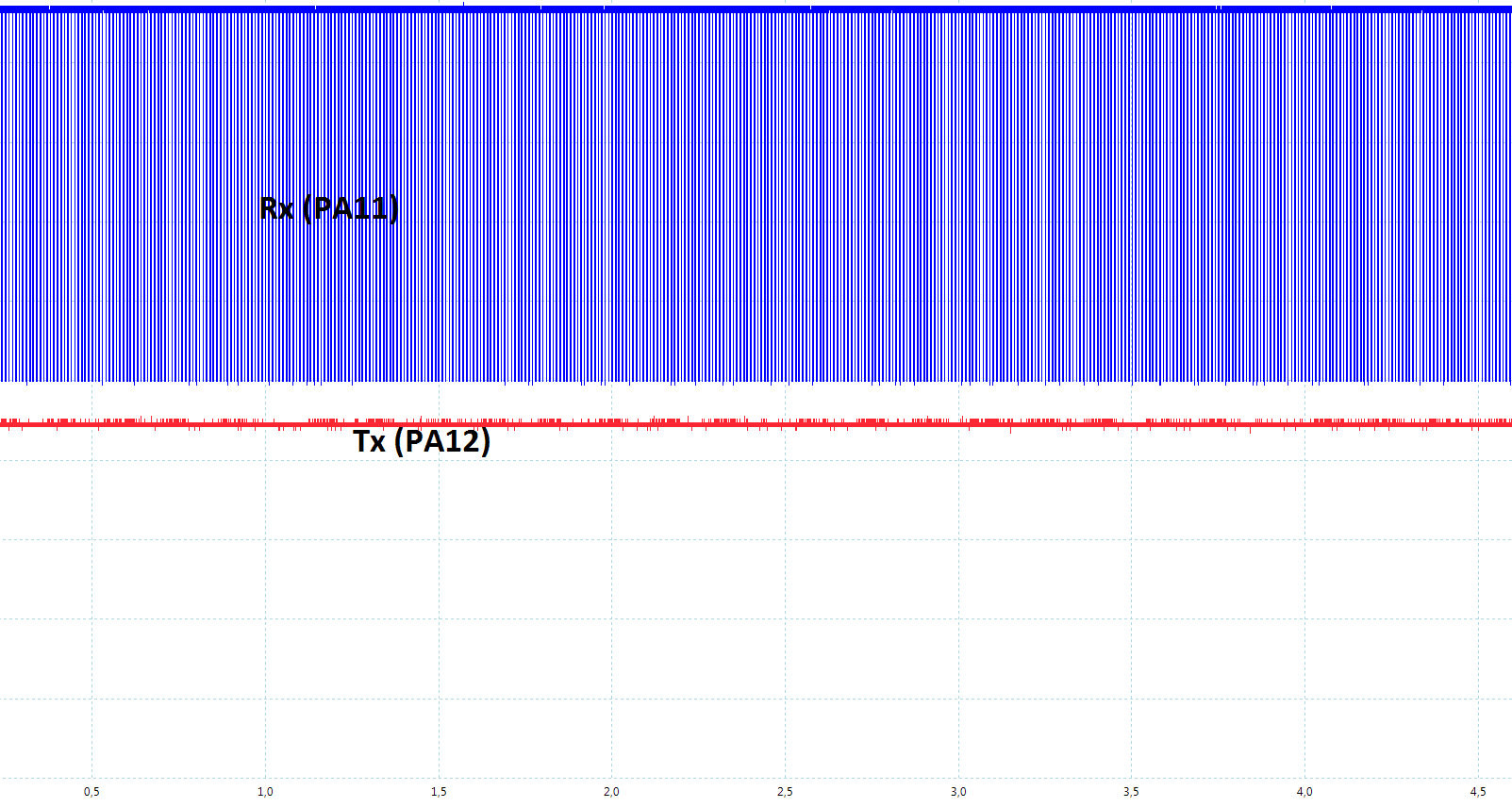
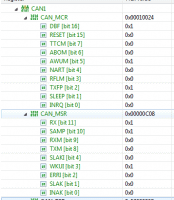
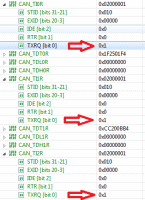
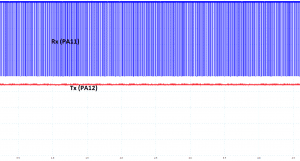
Hej wszystkim, Mam mały problem z zaimplementowaniem protokołu CAN na STM32F103 (tzw bluepillu). Ale po kolei. Mam Bluepilla podłączonego poprzez PA11 (CAN_Rx) i PA12 (CAN_Tx) do transceivera CJMCU-1051 (wejscia CRX -> PA11 i CTX -> PA12 ). Sygnały CANL oraz CANH wychodzące z transceivera) mam połączone z magistralą CAN na któej są już dwie nody i komunikują się ze sobą z baudratem = 500kBps (po sieci biegają 4 ramki): Więc sieć dzial. I teraz mój kod. Konfiguracja zegarów na maksymalne taktowanie - 72MHz ( PCLK1 zgodnie z RM ustawone na 36MHz): void RCC_Conf(void) { // RCC setting reset RCC_DeInit(); // Turn on HSE RCC_HSEConfig(RCC_HSE_ON); // Wait up to HSE will be ready HSEStartUpStatus = RCC_WaitForHSEStartUp(); if(HSEStartUpStatus == SUCCESS) { /* * the introduction of delays is (waitstate) for higher clock rates * is due to the maximum frequency with which it is performed * communication with Flash memory can be 24 MHz */ FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); // wait for flash memory FLASH_SetLatency(FLASH_Latency_2); // HCLK = SYSCLK RCC_HCLKConfig(RCC_SYSCLK_Div1); // PCLK2 = HCLK RCC_PCLK2Config(RCC_HCLK_Div1); // PCLK1 = HCLK/2 RCC_PCLK1Config(RCC_HCLK_Div2); // PLLCLK = 8MHz * 9 = 72 MHz RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); // Turn on PLL RCC_PLLCmd(ENABLE); // Wait up to PLL will be ready while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); // Select PLL as source of clock RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); // Wait up to PLL will be the source of clock while(RCC_GetSYSCLKSource() != 0x08); // Turn on Włączenie clock signal supervision system //RCC_ClockSecuritySystemCmd(ENABLE); } } SysTick skonfigurowany na 1ms: void SysTick_Conf (void) { SysTick_Config(F_PCLK2/8/1000); SysTick->CTRL &= ~SysTick_CTRL_CLKSOURCE_Msk; } No i czas na konfigurację CANa: void CAN_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; uint8_t ststus = 10; /* Configure CAN1 IOs **********************************************/ /* GPIOA and AFIO clocks enable */ RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOA, ENABLE); /* Configure CAN1 RX pin */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//GPIO_Mode_IPU//GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure) /* Configure CAN1 TX pin */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); /* Configure CAN1 and CAN2 **************************************************/ /* CAN1 and Periph clocks enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE); /* CAN1 and CAN2 register init */ CAN_DeInit(CAN1); // CAN_DeInit(CAN2); /* Struct init*/ CAN_StructInit(&CAN_InitStructure); /* CAN1 and CAN2 cell init */ CAN_InitStructure.CAN_TTCM = DISABLE; CAN_InitStructure.CAN_ABOM = DISABLE; CAN_InitStructure.CAN_AWUM = ENABLE;//DISABLE; CAN_InitStructure.CAN_NART = DISABLE; CAN_InitStructure.CAN_RFLM = DISABLE; CAN_InitStructure.CAN_TXFP = ENABLE; CAN_InitStructure.CAN_Mode = CAN_Mode_Normal; CAN_InitStructure.CAN_SJW = CAN_SJW_4tq; CAN_InitStructure.CAN_BS1 = CAN_BS1_8tq; CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq; /* 500KBps */ CAN_InitStructure.CAN_Prescaler =12; /*Initializes the CAN1 and CAN2 */ ststus = CAN_Init(CAN1, &CAN_InitStructure); // CAN_Init(CAN2, &CAN_InitStructure); /* CAN1 filter init */ CAN_FilterInitStructure.CAN_FilterNumber = 1; CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask; CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit; CAN_FilterInitStructure.CAN_FilterIdHigh = 0x1; CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000; CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000; CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000; CAN_FilterInitStructure.CAN_FilterFIFOAssignment = 0; CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; CAN_FilterInit(&CAN_FilterInitStructure); TxMessage.StdId = 0x10; TxMessage.ExtId = 0x00; TxMessage.RTR = CAN_RTR_DATA; TxMessage.IDE = CAN_ID_STD; TxMessage.DLC = 4; } w odpowiedzi na wywołanie funkcji ststus = CAN_Init(CAN1, &CAN_InitStructure); dostaję wartość1 czyli CAN_InitStatus_Success, co potwierdzają rejestry: W głównej pętli programu chcę wysyłać ramkę co 1s, zmienna source_time jest to zmienna inkrementowana w przerwaniu od SysTicka i to ją chcę wysyłać po magostrali while (1) { if(flag_) { TxMessage.Data[0] = (uint8_t)(source_time >> 24); TxMessage.Data[1] = (uint8_t)(source_time >> 16); TxMessage.Data[2] = (uint8_t)(source_time >> 8); TxMessage.Data[3] = (uint8_t)source_time; temp1 = CAN_Transmit(CAN1, &TxMessage); temp2 = CAN_GetLastErrorCode(CAN1); TransmitStatus[0] = CAN_TransmitStatus(CAN1,0); TransmitStatus[1] = CAN_TransmitStatus(CAN1,1); TransmitStatus[2] = CAN_TransmitStatus(CAN1,2); flag_ = 0; } } Rezultatem jest ustawienie się statusu transmisji na (wartość zwraca przez funkcję CAN_TransmitStatus) na pending dla wszystkich banków FIFO, co potwierdzają rejestry Po podłączeniu sond oscyloskopu pomiędzy uP a transceiver, można zaobserwować, że transceiver przepuszcza ramki biegające po CANie -> więc nie jest uszkodzony Reasumując, może ma ktoś pomysł dlaczego STM nie wypuszcza ramki do transcivera tylko jest cały czas w trybie pending?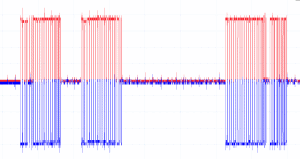
-
Prasówka: ciekawostki o elektronice i programowaniu
amilo_pa odpisał w temacie użytkownika Treker • Wiadomości
Hej nie wiem czy w dobrym dziale piszę (jak coś to proszę o przeniesienie 🙂 ) Zapewne słyszeliście o Kardasiu - człowiek od AVRów. Ostatnio wystartował na polakpotrafi.pl z nowym projektem i komunikacją USB bez użycia scalaczka FT232F, więcej szczegółów pod linkiem. -
Od dawna krakowski inżynier pracuje nad podobnym rozwiązaniem: http://www.gazetakrakowska.pl/artykul/543457,wynalazek-michala-latacza-umozliwi-lot-w-podwodnych-przestworzach,id,t.html http://www.deltaprototypes.pl/technologia.html
-
Kurs STM32 F4 - #7 - Komunikacja przez UART
amilo_pa odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Rozwiązanie problemu-zagadki zadanego przez autora, jakie u mnie zadziałało, znajduję się w tym linku ponadto jest tam pokazane rozwiązanie związane z nieznikającym statusem HAL_UART_STATE_BUSY_TX. -
Witam, Mam strukturę czujnika DS18B20 typedef struct { uint8_t ID_sensor; //numer ID czujnika uint8_t status_sensor; //Status czujnika (0 - nie wykryty, 1- wykryty) uint8_t subzero; //znak uint8_t cel; //wartosc całkowita uint8_t cel_fract_bits; //wartosc ułamkow uint8_t threshold_on_1; //próg załączenia pierwszego wyjcia uint8_t threshold_off_1; //próg wyłączenia pierwszego wyjcia uint8_t threshold_on_2; //próg załączenia drugiego wyjcia uint8_t threshold_off_2; //próg wyłączenia drugiego wyjcia uint8_t offset_sign; //znak offsetu temperatury uint8_t offset_cel; //wartosc całkowita offsetu temperatury uint8_t offset_cel_fract_bits; //wartosc ułamkowa offsetu temperatury } DS18B20_struct_Flash; Chciałbym tą strukturę zapisać w pamięci EEPROM i podczas restartu STMa chciałbym porównać jej zawartość ze strukturą zapisaną w pamięci FLASH i załadować ją później do pamięci SRAM. Proszę o podpowiedzenie jak to można zrobić wykorzystując biblioteki HALA 🙂
-
Kurs STM32 F4 - #7 - Komunikacja przez UART
amilo_pa odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Hej, kurs - BOMBA 😉 Mam małą prośbę, może ktoś podrzucić mi ciało funkcji UART_DMATransmitCplt z biblioteki stm32f4xx_hal_uart.c ? Przerabiam cały kurs na innej płytce i właśnie w tej bibliotece w podaj funkcji musiałem coś przerobić, chciałbym zobaczyć jak jest ona zrealizowana w STM32f4 🙂 z góry dziękuję 🙂 -
STM32F0 - UART i przerwanie od timerów - wykrzaczenia się programu
amilo_pa odpisał w temacie użytkownika amilo_pa • Mikrokontrolery
Dla potomnych 🙂 Udało mi się rozwiązać problem z niezerującym się statusem HAL_UART_STATE_BUSY_TX. Polecam zaglądnąć tutaj: https://community.st.com/thread/9316#comment-137236 a w celu zapobiegnięcia pobrania nowych danych przed końcem wysłania poprzednich można dołożyć taki fragment kodu: //Przerwanie UART DMA void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { UART_flag = TRUE; //Ustawienie flagi UARTA } // Po odebraniu danej wykonaj program if(UART_flag == TRUE){ UART_flag = FALSE; Data_size = sprintf(&Data, "Odebrano znak: %c.\r\n", UART1_received); HAL_UART_Transmit_DMA(&huart1, (uint8_t*)Data ,Data_size);// Rozpoczecie nadawania danych z wykorzystaniem przerwan flag_UART_gState = TRUE; } if((huart1.gState == HAL_UART_STATE_READY) & flag_UART_gState){ HAL_UART_Receive_DMA(&huart1, (uint8_t *)&UART1_received, size_UART1_received); // Ponowne włączenie nasłuchiwania flag_UART_gState = FALSE; } Ponadto funkcja sprintf w: Data_size = sprintf(&Data, "Odebrano znak: %d.\r\n",&UART1_received); dodawała jeden znak ASCII. Z każdą nową zmienną Data ten znak ASCII był inny (kolejny z tabeli kodów ASCII). Rozwiązaniem tego problemu okazało się obłożenie zmiennej UART1_received funkcją atoi() Data_size = sprintf(&Data, "Odebrano znak: %d.\r\n", atoi(&UART1_received)); -
Kurs STM32F4 - #13 - Podsumowanie
amilo_pa odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Treker a jak później importujesz ten spakowany projekt ? -
Kurs STM32F4 - #13 - Podsumowanie
amilo_pa odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
W jaki sposób można robić backupy swoich projektów w Eclipsie ? Próba eksportowania, zmiany nazwy i wczytania nie przynosi pozytywnych efektów - cały projekt się psuje :/ -
STM32F0 - UART i przerwanie od timerów - wykrzaczenia się programu
amilo_pa odpisał w temacie użytkownika amilo_pa • Mikrokontrolery
Hej, Dziękuję za wyjaśnienie 🙂 To teraz dopytam, powiedzmy, że znam podstawy programowania w C, ale nie mam dużej praktyki w tym temacie więc nie wszytko jest dla mnie oczywiste 🙂 jak się pomylę to sprostuj mnie 🙂 W funkcjach: HAL_UART_Receive_DMA(&huart1,Received,10); HAL_UART_Transmit_DMA(&huart1,Data,40); Przed zmienną huart1 mam dać znaczek &? a co ze zmienną Received, tutaj też dać &? Co do przerwań to proponujesz np zrobić zmienną lokalną załóżmy Value_UART, do niej ładować to co wyślę po UARCIE a w pętli głównej dać switcha i w zależności od wartości zmiennej Value_UART wykonywać odpowiednie operacje ? [ Dodano: 29-06-2017, 23:22 ] Ogarnąłem worningi zgłaszane od funkcji HAL_UART_Receive_DMA oraz HAL_UART_Transmit_DMA. Został tylko ten od funkcji sprintf. Ale żeby nie było za łatwo to znalazłem coś jeszcze, mianowicie funkcja HAL_UART_Transmit_DMA nigdy nie widzi końca transmisji. 1. Włączam UARTA 2. Włączam nasłuch na linii 3. Odbieram po raz pierwszy jakiś znak 4. Po wysłaniu wiadomości dalej gState jest ustawione na HAL_UART_STATE_BUSY_TX ( mogę czekać nawet i 15 minut i tak dalej będzie ten sam status) 5. Ponownie włączam nasłuch 6. Odbieram po raz drugi jakiś znak 7 Program się wyburacz (Działa odbieranie danych, a bufor wyjściowy nie reaguje) Gdzie szukać przyczyny? Poniżej cały kod programu: /** ****************************************************************************** * File Name : main.c * Description : Main program body ****************************************************************************** * * COPYRIGHT(c) 2017 STMicroelectronics * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "stm32f0xx_hal.h" /* USER CODE BEGIN Includes */ #define TRUE 1 #define FALSE 0 #define size_UART1_received 1 /* USER CODE END Includes */ /* Private variables ---------------------------------------------------------*/ TIM_HandleTypeDef htim14; TIM_HandleTypeDef htim16; UART_HandleTypeDef huart1; DMA_HandleTypeDef hdma_usart1_rx; DMA_HandleTypeDef hdma_usart1_tx; /* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ uint8_t UART1_received; volatile uint8_t UART_flag; volatile uint8_t Data[50]; // Tablica przechowujaca wysylana wiadomosc. volatile uint16_t Data_size = 0;// Rozmiar tablicy przechowujacej wysylana wiadomosc. uint8_t czujnik_cnt; //liczba czujnikó na magistralii volatile uint8_t s1_flag; //flaga tyknięcia timera co 1 sekundę volatile uint8_t sekundy; //licznik sekund 0-59 uint8_t subzero, cal, cel_fract_bits; /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); void Error_Handler(void); static void MX_GPIO_Init(void); static void MX_DMA_Init(void); static void MX_USART1_UART_Init(void); static void MX_TIM14_Init(void); static void MX_TIM16_Init(void); /* USER CODE BEGIN PFP */ /* Private function prototypes -----------------------------------------------*/ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim); //Funkcja obsługująca przerwania od timerów void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //Funkcja obsługująca przerwania do UARTa /* USER CODE END PFP */ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_DMA_Init(); MX_TIM14_Init(); MX_TIM16_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ HAL_TIM_BaseBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE; huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT; if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } } /** * Enable DMA controller clock */ static void MX_DMA_Init(void) { /* DMA controller clock enable */ __HAL_RCC_DMA1_CLK_ENABLE(); /* DMA interrupt init */ /* DMA1_Channel2_3_IRQn interrupt configuration */ HAL_NVIC_SetPriority(DMA1_Channel2_3_IRQn, 0, 0); HAL_NVIC_EnableIRQ(DMA1_Channel2_3_IRQn); } /** Configure pins as * Analog * Input * Output * EVENT_OUT * EXTI */ static void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(GPIOC, LED_BLUE_Pin|LED_GREEN_Pin, GPIO_PIN_RESET); /*Configure GPIO pins : LED_BLUE_Pin LED_GREEN_Pin */ GPIO_InitStruct.Pin = LED_BLUE_Pin|LED_GREEN_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); } /* USER CODE BEGIN 4 */ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){ if(htim->Instance == TIM14){ static uint16_t cnt =0; // uint8_t Data[50]; // uint16_t size; if(++cnt>99){ //gdy mineła sekunda s1_flag = TRUE; //ustaw flagę tyknięca sekundy sekundy ++; //zwiększ licznik sekund // size = sprintf(Data, "Liczba sekund: %d.\r\n",sekundy); // HAL_UART_Transmit_DMA(&huart1, Data, size); // HAL_UART_Receive_DMA(&huart1, &UART1_received, size_UART1_received); // Ponowne włączenie nasłuchiwania HAL_GPIO_TogglePin(LED_GREEN_GPIO_Port,LED_GREEN_Pin); if(sekundy>59) sekundy =0; //jeżeli czba sekund >59 - wyzeruj cnt =0; //wyzeruj licznik ms } } } void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { UART_flag = TRUE; //Ustawienie flagi UARTA } void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) { HAL_UART_Receive_DMA(&huart1, (uint8_t *)&UART1_received, size_UART1_received); // Ponowne włączenie nasłuchiwania } /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @param None * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler */ /* User can add his own implementation to report the HAL error return state */ while(1) { } /* USER CODE END Error_Handler */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t* file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/ -
STM32F0 - UART i przerwanie od timerów - wykrzaczenia się programu
amilo_pa odpisał w temacie użytkownika amilo_pa • Mikrokontrolery
Hej, Dziękuję za reakcję 🙂 Już poprawiłem informację w polu temat. Co do Twoich uwag to: 1. Miałeś rację. w linijce HAL_UART_Transmit_DMA(&huart, Data ,size); powinien być huart1 2. Wszystkie informacje dotyczące programowania STMów posiadam tylko z tego kursu: https://forbot.pl/blog/artykuly/programowanie/kurs-stm32-f4-7-komunikacja-przez-uart-id13472 Jeżeli chodzi o kompilacje to są zgłaszane dwa worningi tyczące się funkcji sprintf: E:/STM32_ARM/ECLIPS_V2/Workspace_kepler/UART_v1/UART_v1/Src/main.c: In function 'HAL_TIM_PeriodElapsedCallback': E:/STM32_ARM/ECLIPS_V2/Workspace_kepler/UART_v1/UART_v1/Src/main.c:291:19: warning: pointer targets in passing argument 1 of 'sprintf' differ in signedness [-Wpointer-sign] size = sprintf(Data, "Liczba sekund: %d.\r\n",sekundy); oraz E:/STM32_ARM/ECLIPS_V2/Workspace_kepler/UART_v1/UART_v1/Src/main.c: In function 'HAL_UART_RxCpltCallback': E:/STM32_ARM/ECLIPS_V2/Workspace_kepler/UART_v1/UART_v1/Src/main.c:305:17: warning: pointer targets in passing argument 1 of 'sprintf' differ in signedness [-Wpointer-sign] size = sprintf(Data, "Odebrana wiadomosc: %c.\r\n",40); A teraz to co się dzieje w podczas debugowania projektu: 1. Uruchamiam program w trybie Debug. 2. Program wchodzi w przerwanie od timera TIM14 (struktura htim14 jest ładnie przekazywana do przerwania: 3. Generuję zmienną Data (zmienna ładnie się tworzy, ale struktura htim zwraca błąd o treści: htim TIM_HandleTypeDef * Error: Multiple errors reported.\ Failed to execute MI command: -var-update 1 var1 Error message from debugger back end: value has been optimized out\ Failed to execute MI command: -var-update 1 var1 Error message from debugger back end: value has been optimized out 4. Wysyłam dane na UARTa (struktura htim dalej ma błąd, w terminalu wyświetla się wiadomość Liczba sekund 1.) 5. Ponownie włączam nasłuchiwanie na UART. 6. Puszczam program dalej i czekam na kolejne przerwanie i breakpoint 7. Jestem w przerwaniu od timera14 (struktura htim wygląda tak jak w pkt 2, ale zgłasza błąd: Failed to execute MI command: -var-update 1 var1 Error message from debugger back end: value has been optimized out 8. wykonuje funkcję sprintf (zmienna data wykonała się poprawnie. 9. Wysyłam dane na UART (na terminalu nic się nie wyświetla, struktura htim zwraca błą: htim TIM_HandleTypeDef * Error: Multiple errors reported.\ Failed to execute MI command: -var-update 1 var1 Error message from debugger back end: value has been optimized out\ Failed to execute MI command: -var-update 1 var1 Error message from debugger back end: value has been optimized out Poniżej cały main.c /** ****************************************************************************** * File Name : main.c * Description : Main program body ****************************************************************************** * * COPYRIGHT(c) 2017 STMicroelectronics * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "stm32f0xx_hal.h" /* USER CODE BEGIN Includes */ #define TRUE 1 #define FALSE 0 #define size_Received 1 /* USER CODE END Includes */ /* Private variables ---------------------------------------------------------*/ TIM_HandleTypeDef htim14; TIM_HandleTypeDef htim16; UART_HandleTypeDef huart1; DMA_HandleTypeDef hdma_usart1_rx; DMA_HandleTypeDef hdma_usart1_tx; /* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ uint8_t Received; uint8_t czujnik_cnt; //liczba czujnikó na magistralii volatile uint8_t s1_flag; //flaga tyknięcia timera co 1 sekundę volatile uint8_t sekundy; //licznik sekund 0-59 uint8_t subzero, cal, cel_fract_bits; /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); void Error_Handler(void); static void MX_GPIO_Init(void); static void MX_DMA_Init(void); static void MX_USART1_UART_Init(void); static void MX_TIM14_Init(void); static void MX_TIM16_Init(void); /* USER CODE BEGIN PFP */ /* Private function prototypes -----------------------------------------------*/ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim); //Funkcja obsługująca przerwania od timerów void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //Funkcja obsługująca przerwania do UARTa /* USER CODE END PFP */ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_DMA_Init(); MX_TIM14_Init(); MX_TIM16_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ HAL_TIM_BaseBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE; huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT; if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } } /** * Enable DMA controller clock */ static void MX_DMA_Init(void) { /* DMA controller clock enable */ __HAL_RCC_DMA1_CLK_ENABLE(); /* DMA interrupt init */ /* DMA1_Channel2_3_IRQn interrupt configuration */ HAL_NVIC_SetPriority(DMA1_Channel2_3_IRQn, 0, 0); HAL_NVIC_EnableIRQ(DMA1_Channel2_3_IRQn); } /** Configure pins as * Analog * Input * Output * EVENT_OUT * EXTI */ static void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(GPIOC, LED_BLUE_Pin|LED_GREEN_Pin, GPIO_PIN_RESET); /*Configure GPIO pins : LED_BLUE_Pin LED_GREEN_Pin */ GPIO_InitStruct.Pin = LED_BLUE_Pin|LED_GREEN_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); } /* USER CODE BEGIN 4 */ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){ if(htim->Instance == TIM14){ static uint16_t cnt =0; uint8_t Data[50]; uint16_t size; if(++cnt>99){ //gdy mineła sekunda s1_flag = TRUE; //ustaw flagę tyknięca sekundy sekundy ++; //zwiększ licznik sekund size = sprintf(Data, "Liczba sekund: %d.\r\n",sekundy); HAL_UART_Transmit_DMA(&huart1, Data, size); HAL_UART_Receive_DMA(&huart1, &Received, size_Received); // Ponowne włączenie nasłuchiwania HAL_GPIO_TogglePin(LED_GREEN_GPIO_Port,LED_GREEN_Pin); if(sekundy>59) sekundy =0; //jeżeli czba sekund >59 - wyzeruj cnt =0; //wyzeruj licznik ms } } } void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { uint8_t Data[40]; // Tablica przechowujaca wysylana wiadomosc. uint16_t size =0; HAL_GPIO_TogglePin(LED_BLUE_GPIO_Port, LED_BLUE_Pin); size = sprintf(Data, "Odebrana wiadomosc: %c.\r\n",40); HAL_UART_Transmit_DMA(&huart1, Data ,size);// Rozpoczecie nadawania danych z wykorzystaniem przerwan HAL_UART_Receive_DMA(&huart1, &Received, size_Received); // Ponowne włączenie nasłuchiwania } void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) { HAL_UART_Receive_DMA(&huart1, &Received, size_Received); // Ponowne włączenie nasłuchiwania } /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @param None * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler */ /* User can add his own implementation to report the HAL error return state */ while(1) { } /* USER CODE END Error_Handler */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t* file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/ I tak w kółko... Już mi sił brakuję... -
Witam Panowie, Próbuję odpalić komunikację UART wraz z Timerem i program się zacina na funkcji wysyłającej dane po UART. Sytuacja wygląda następująco: 1. Mam ustawiony Timer na 10ms i w nim zapalam diodę: void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){ if(htim->Instance == TIM14){ static uint16_t cnt =0; uint Data[50]; uint16_t size; if(++cnt>99){ //gdy mineła sekunda s1_flag = TRUE; //ustaw flagę tyknięca sekundy sekundy ++; //zwiększ licznik sekund size = sprintf(Data, "Liczba sekund: %d.\r\n",sekundy); HAL_UART_Transmit_DMA(&huart1, Data, size); HAL_GPIO_TogglePin(LED_GREEN_GPIO_Port,LED_GREEN_Pin); if(sekundy>59) sekundy =0; //jeżeli czba sekund >59 - wyzeruj cnt =0; //wyzeruj licznik ms } } } W programie RealTerm ładnie wyświetlają liczba kolejnych sekund - czyli komunikacja działa Wpisuje w programie RealTerm np 0. i program zawiesza się. Kod przerwania UART: void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { static uint8_t Data[40]; // Tablica przechowujaca wysylana wiadomosc. uint16_t size =0; HAL_GPIO_TogglePin(LED_BLUE_GPIO_Port, LED_BLUE_Pin); size = sprintf(Data, "Odebrana wiadomosc: %d.\r\n",40); HAL_UART_Transmit_DMA(&huart, Data ,size);// Rozpoczecie nadawania danych z wykorzystaniem przerwan } void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) { HAL_UART_Receive_DMA(&huart1, Received, size_Received); // Ponowne włączenie nasłuchiwania } Program zacina się w linijce HAL_UART_Transmit_DMA(&huart, Data ,size);// Rozpoczecie nadawania danych z wykorzystaniem przerwa Po zacięciu przechodzi do biblioteki: stm32f0xx_it.c do linijki 69 /** * @brief This function handles Hard fault interrupt. */ void HardFault_Handler(void) { /* USER CODE BEGIN HardFault_IRQn 0 */ /* USER CODE END HardFault_IRQn 0 */ while (1) { } /* USER CODE BEGIN HardFault_IRQn 1 */ /* USER CODE END HardFault_IRQn 1 */ } Poniżej cały kod programu main.c /** ****************************************************************************** * File Name : main.c * Description : Main program body ****************************************************************************** * * COPYRIGHT(c) 2017 STMicroelectronics * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "stm32f0xx_hal.h" /* USER CODE BEGIN Includes */ #define TRUE 1 #define FALSE 0 #define size_Received 1 /* USER CODE END Includes */ /* Private variables ---------------------------------------------------------*/ TIM_HandleTypeDef htim14; TIM_HandleTypeDef htim16; UART_HandleTypeDef huart1; DMA_HandleTypeDef hdma_usart1_rx; DMA_HandleTypeDef hdma_usart1_tx; /* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ uint8_t Received[size_Received]; uint8_t czujnik_cnt; //liczba czujnikó na magistralii volatile uint8_t s1_flag; //flaga tyknięcia timera co 1 sekundę volatile uint8_t sekundy; //licznik sekund 0-59 uint8_t subzero, cal, cel_fract_bits; /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); void Error_Handler(void); static void MX_GPIO_Init(void); static void MX_DMA_Init(void); static void MX_USART1_UART_Init(void); static void MX_TIM14_Init(void); static void MX_TIM16_Init(void); /* USER CODE BEGIN PFP */ /* Private function prototypes -----------------------------------------------*/ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim); //Funkcja obsługująca przerwania od timerów void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //Funkcja obsługująca przerwania do UARTa /* USER CODE END PFP */ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_DMA_Init(); MX_USART1_UART_Init(); MX_TIM14_Init(); MX_TIM16_Init(); /* USER CODE BEGIN 2 */ HAL_TIM_BaseBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE; huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT; if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } } /** * Enable DMA controller clock */ static void MX_DMA_Init(void) { /* DMA controller clock enable */ __HAL_RCC_DMA1_CLK_ENABLE(); /* DMA interrupt init */ /* DMA1_Channel2_3_IRQn interrupt configuration */ HAL_NVIC_SetPriority(DMA1_Channel2_3_IRQn, 0, 0); HAL_NVIC_EnableIRQ(DMA1_Channel2_3_IRQn); } /** Configure pins as * Analog * Input * Output * EVENT_OUT * EXTI */ static void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(GPIOC, LED_BLUE_Pin|LED_GREEN_Pin, GPIO_PIN_RESET); /*Configure GPIO pins : LED_BLUE_Pin LED_GREEN_Pin */ GPIO_InitStruct.Pin = LED_BLUE_Pin|LED_GREEN_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); } /* USER CODE BEGIN 4 */ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){ if(htim->Instance == TIM14){ static uint16_t cnt =0; uint Data[50]; uint16_t size; if(++cnt>99){ //gdy mineła sekunda s1_flag = TRUE; //ustaw flagę tyknięca sekundy sekundy ++; //zwiększ licznik sekund size = sprintf(Data, "Liczba sekund: %d.\r\n",sekundy); HAL_UART_Transmit_DMA(&huart1, Data, size); HAL_GPIO_TogglePin(LED_GREEN_GPIO_Port,LED_GREEN_Pin); if(sekundy>59) sekundy =0; //jeżeli czba sekund >59 - wyzeruj cnt =0; //wyzeruj licznik ms } } } void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { static uint8_t Data[40]; // Tablica przechowujaca wysylana wiadomosc. uint16_t size =0; HAL_GPIO_TogglePin(LED_BLUE_GPIO_Port, LED_BLUE_Pin); size = sprintf(Data, "Odebrana wiadomosc: %d.\r\n",40); HAL_UART_Transmit_DMA(&huart, Data ,size);// Rozpoczecie nadawania danych z wykorzystaniem przerwan } void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) { HAL_UART_Receive_DMA(&huart1, Received, size_Received); // Ponowne włączenie nasłuchiwania } /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @param None * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler */ /* User can add his own implementation to report the HAL error return state */ while(1) { } /* USER CODE END Error_Handler */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t* file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/ Może być winny priorytet przerwań? Jeżeli tak, to jak ustawić aby UART miał największy ?
-
Kurs STM32 F4 - #6 - Liczniki, konfiguracja zegara, debugger
amilo_pa odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Kolego dzięki, podziałało 😅 -
Kurs STM32 F4 - #5 - Pomiar napięcia (ADC), DMA, STMStudio
amilo_pa odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Hej, Dzięki, pomogło 🙂 -
Kurs STM32 F4 - #5 - Pomiar napięcia (ADC), DMA, STMStudio
amilo_pa odpisał w temacie użytkownika Komentator • Artykuły redakcji (blog)
Witam, Postanowiłem dołożyć uśrednianie temperatury. uint8_t div_temp = 5; float Temperature_instantaneous; float Temperature; float Temperature_average; if( HAL_ADC_PollForConversion(&hadc, 10) == HAL_OK){// Oczekiwanie na zakonczenie konwersji PomiarADC = HAL_ADC_GetValue(&hadc);// Pobranie zmierzonej wartosci Vsense = (SupplyVoltage*PomiarADC)/ADCResolution;// Przeliczenie wartosci zmierzonej na napiecie Temperature_instantaneous = ((Vsense-V30)/Avg_slope)+30;// Obliczenie temperatury chwilowej Temperature_average = Temperature_average*(div_temp-1) + Temperature_instantaneous; Temperature= Temperature_average/div_temp; HAL_ADC_Start(&hadc);// Rozpoczecie nowej konwersji } Efektem takiego kodu jest zwrot wartości Temperature_average oraz Temperature w STMStudio jako "Infinit". Macie może pomysł co tutaj jest źle ?