Witam
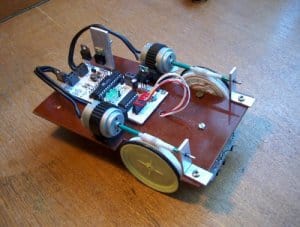
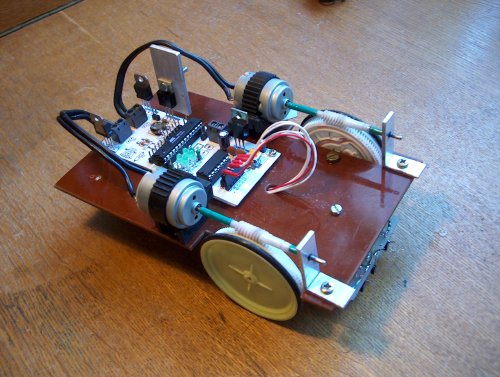
Przedstawiam moją konstrukcję, jest nią robot typu linefollower.
Robotem steruje Atmega 8, na razie pracuje na wewnętrznym układzie taktującym. Program napisałem w asemblerze. Wszystkie elementy robota są zamocowane na płytce z tekstolitu
Napęd:
Są to dwa silniki na 3V z własnoręcznie zrobionymi przekładniami ślimakowymi z części od magnetowidów.
Sensory to fotodiody i fototranzystory wyciągnięte z myszki
komputerowej.
Schemat czujników:
Zasilanie to chwilowo zasilacz.
Poniżej filmiki z pracy robota i fotki:
https://youtube.com/watch?v=FCmZYi3Lypg
https://youtube.com/watch?v=jN-yaD6O1nE
https://youtube.com/watch?v=vlUHhkQ6Mkw



")